PRO
EzAng
USA
Asked
— Edited
Alternative To The Scary Terry Sound Board To Drive A Jaw Servo
What is the alternative to the Scary Terry "sound board" to drive a jaw servo?
open:
1 - AudioToolBox Plugin
2 - Also open a scrip, add ControlCommand("AudioToolbox Plugin", "ImportUWPVoices")
3 - open speech settings
4- open the talk servo - set up your servo here
many voice now, good luck
Related Hardware (view all EZB hardware)

Arduino Genuino Uno
by Arduino
Program Arduino Uno with EZB firmware for Synthiam ARC control; pinouts, PWM pins and frequency details for Arduino boards.
USB
Servos
12
Camera
Audio
UART
✕
I2C
ADC
6
Digital
14

Got my answer
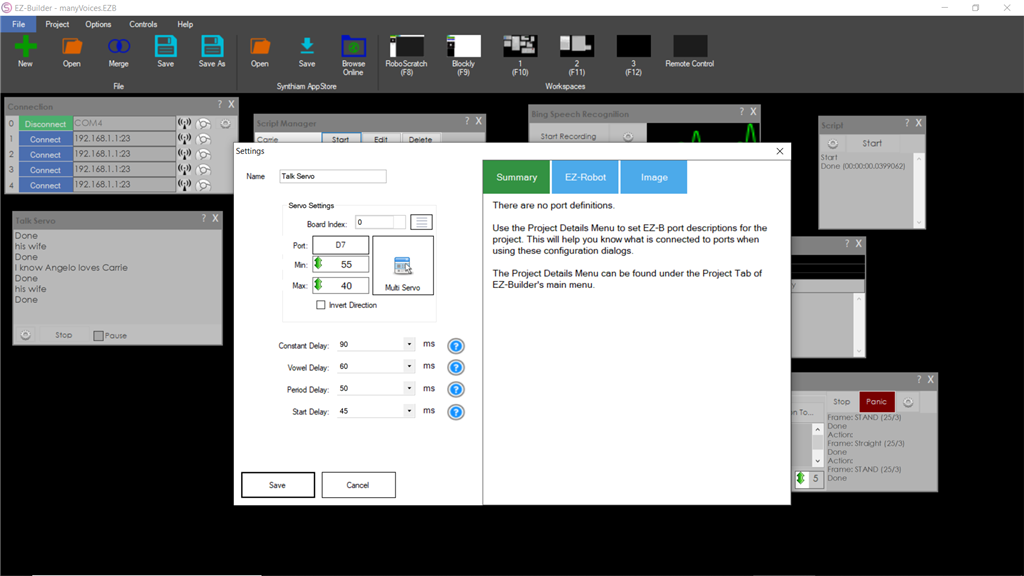
https://synthiam.com/Products/Controls/Audio/Talk-Servo-16179
This control will bind to the Text To Speech engine. When ever a text to speech EZ-Script command is executed (i.e. Say, SayEZB, SayWait, SayEZBWAit), this control will move the specified servos to simulate a mouth movement. If your robot has servos connected to simulate a mouth, this control will move those servos while speaking.
Got my answer
https://synthiam.com/Products/Controls/Audio/Talk-Servo-16179
The talk servo app works very good, just make sure your sentences are short :-)
here is my progress:
I enjoyed your new friend. Looking forward to your future updates.
Thanks, I am trying lol
to avoid spamming or hijack the other thread: https://synthiam.com/Community/Questions/Life-s-challenges-and-the-future-18692/comments
you wrote:
You have already the answers:If you are looking for an ARC/ARC solution you have the: https://synthiam.com/Products/Controls/Audio/Talk-Servo-16179.
if you are looking for an hardware alternative, use google search i found this one: https://www.frightprops.com/picotalk-servo-controller.html
If you are trying to integrated Alexa, Google Home an external hardware controller is the easiest solution.
ptp
maybe a external hardware controller is the easiest solution.
simply put:
As you can see from the above video, I already understand the "talk servo" in ARC, I use it, it works well with my robot. I use this with my Arduino.
This has nothing to do with: Asking my Alexa a question and having the answer come out of my robots mouth, understand?
something like this: https://youtu.be/xwCsENHCenU
I tried the Blue tooth, it was only one way, my computer's audio was playing on the Alexa unit.
I want to understand the other way around. Alexa's audio playing on my computer - ARC
- your computer does not play sounds, your computer outputs audio to one or more speakers.
Did you understand the setup ? Do you understand how the scary servo works ?Alexa outputs the audio to the scary board (Red connection)
scary board outputs the audio to the speaker behind the head (BLUE connection)
scary board controls the head servos (GREEN connection)
The setup does not require ARC / ARC / PC
you can read more about amazon dot integration here: https://www.pcmag.com/how-to/how-to-connect-amazon-echo-dot-to-an-external-speaker