pacomms
Yet Another Omnibot Question For Dj ;-)
So i am still a little confused about the motor H bridge and the omnibot, i have bought the sparkfun motor controller you suggest and please bear in mind this is for use on an omnibot with standard motors in, so ... i understand i think the connections from the h bridge to the ez b but can i check my thinking with you,
motor A (Left)
- of motor to motor 1 out A
- of motor to motor 1 out B
motor B (Right)
- of motor to motor 2 out A
- of motor to motor 2 out B
VM connected to + 12V of battery
servo lead one AIN1 to white of ezb port9 VCC to red of ezb port 9 GND to black of ezb port 9
Servo lead two AIN2 to white of ezb port 10 VCC to red of ezb port 10 GND to black of ezb port 10
Servo lead three BIN1 to white of ezb port 11 VCC to red of ezb port 11 GND to black of ezb port 11
Servo lead Four BIN2 to white of ezb port 12 VCC to red of ezb port 12 GND no connection
I am presuming that in my scenario above that port 9 and 10 is left motor 11 and 12 is right motor.
Are the motors on the omnibot capable and ok with a 12v supply from the battery to VM ? or will it burn them out, i know the h bridge can take upto 15v but can the motors handle 12v ? or have i got this completely wrong lol. Sorry for long post but just wanna get this right from the start.
Thanks alot Kurt

Hello
This thread has some photos: https://synthiam.com/Community/Questions/31
[feature] You will need 4 servo Cables
VM: Connect this directly to the Positive terminal of your battery
Servo Cable 1 AIN1: White VCC: Red (+5) GND: Black (gnd)
Servo Cable 2 AIN2: White PWMA: Red (+5) GND: Black (gnd)
Servo Cable 3 BIN1: White STBY: Red (+5) GND: Black (gnd)
Servo Cable 4 BIN2: White PWMB: Red (+5) *You do not neet to connect the 4th servo wire GND to anything because there are only 3 gnds on the motor controller board. Just snip the wire. [/feature]
Easiest to connect PWM to +5. However, if you want to vary speed then connect the PWM to digital ports of the EZ-B. Then configure those ports to be used as Servos. The higher the servo, the more PWM will be sent which results in faster speed. Slow speed, lower servo.
12 volts to the omnibot motor might be too much. I have 6v, and it moves at the original speed. 12v will double the speed and probably burn the motor out quickly. If you are going to expirement with 12v, make sure you have a replacement motor first
Can you not find a ~7v battery instead of the 12v one in your area? Or are you embedding a PC with it, which is why you choose 12?
If you require 12v, then you'll need a strong VR for the motors. I would suggest a LM1084 +5 5A voltage regulator. You'll have to wire it yourself, but it isn't hard.
Ahh ok so i guess i can use the 12v to 6v convertor i have, its really for a car laptop power supply however the voltage is switcheable so i think that should work, i presume i dont need to connect the gnd from the battery to the motor controller do i ? it should pick up the gnd from the other inputs so i think i understand now....ish lol im a bit of a noob when it comes to h bridges i usually just use servos but they would be to low power for the omnibot i have in mind, and yes the power will be 12v because im gonna put in a mini itx and try to source a small screen for the bot for the front, should look cool dunno how long the bat would last though, i have got a new battry that was from a golf cart so very high mah...
Thanks alot Kurt
It will last quite a while. Are you using a solid state storage device? Compaq Flash or something? Those draw very little current compared to a physical HD.
Sounds like you're on the ball!
I did recommend the Sparkfun controller. But it seems many people have issues with it. So since then, we have our own controller coming soon. It should be (fingers crossed) here today, or tomorrow.
Our EZ-Robot HBridge is operated by a single wire, rather than 4. And it has adjustable speeds, etc.
With our controller, you will be able to use the 12v battery directly to the HBridge. Simply select a slower speed, rather than full speed.
Full speed on our hbridge with the 12v and omnibot motor will most likely cook it. Half speed would probably be 6v ... A multimeter will help you with that
... A multimeter will help you with that
Ahh your H bridge sounds perfect lemme know when its available and i will buy one post haste, i should start hacking tomorrow i hope work permitting and i will keep you posted on progress ;-)
Thanks Kurt
Hey guys,
I was just wondering if someone could help me out, in the omnibot there's an orange and yellow wire on one motor and a brown and red wire on the other. Is there any way to figure out which ones are the positive and which are negative to connect to the H-bridge
Not sure it really matters as I just kept changing the ports in ARC H Bridge Movement Panel until I got a combination that moved the robot in the right direction. Or get a battery and power each motor so they turn in the same direction??
That's exactly what I did, I hooked them up 3 different ways until I figured out the combo that made it all go the same way. Thanks!
Ok here's the better question.
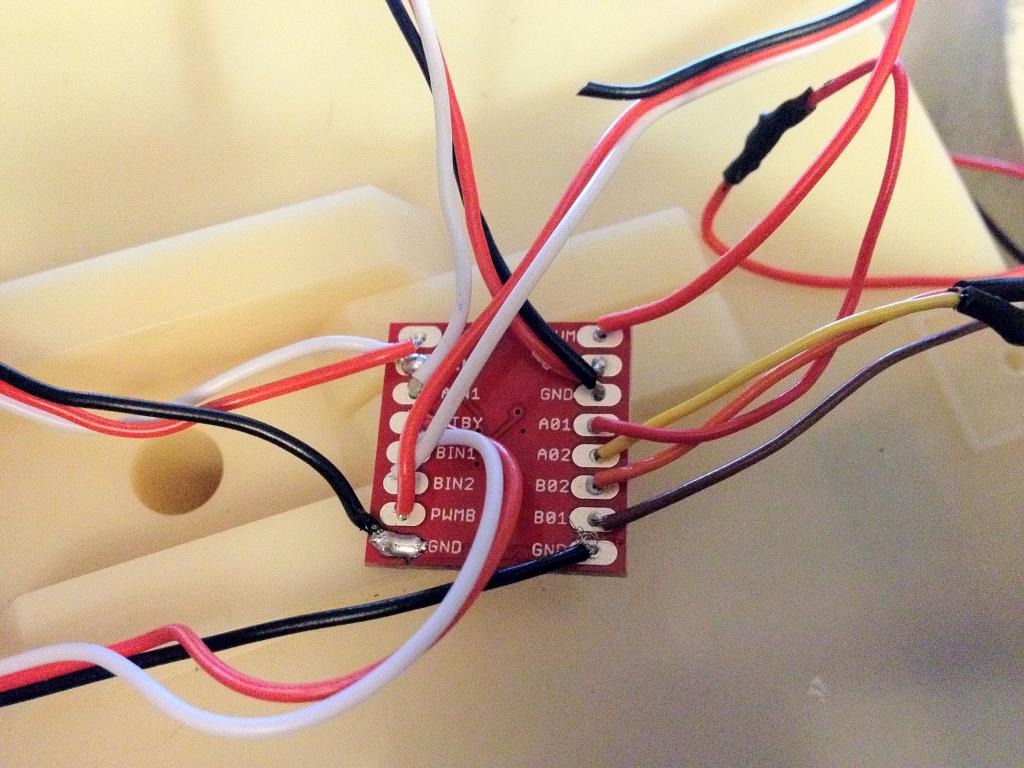
I think I wired everything right, see the attached picture if you don't believe me...
If I'm supposed to connect the wire in the VM slot to the positive terminal of my battery is there anything I should be connecting to the negative?
Also I'm guessing I'll be needing more than the 6 AA batteries I've been using before I can amp this whole thing up for a test run.
The good news is that when I take the battery pack that came with my EZ-B and take the red VM wire and insert it into the positive channel with the little adapter and power up the EZ-B and I try and make the wheels move I hear a faint click noise, so I can't be that far off.
EDIT:
I also just noticed in DJs video he doesn't attach the VM to a battery at all, he connects it right back to the board.
Should I be doing that also?