PRO
RoboHappy
USA
Asked
 Wowwee Rovio
— Movement panel integrating WowWee Rovio with Synthiam ARC for remote drive, live camera, audio and docking control. Under development.
Try it →
Wowwee Rovio
— Movement panel integrating WowWee Rovio with Synthiam ARC for remote drive, live camera, audio and docking control. Under development.
Try it →

Sorry, first number is the ezb number. I have 4 of them in my robot. Second is the port number and third is the servo speed I want to set.
Autoposition is the way to go. Great feature.
hi dave thanks for the info.so thats connection number 2.
initalvexgrippertest.EZB Here is the file I was working on,updated...... Hope it came thru this time.
No its same erro a 404.
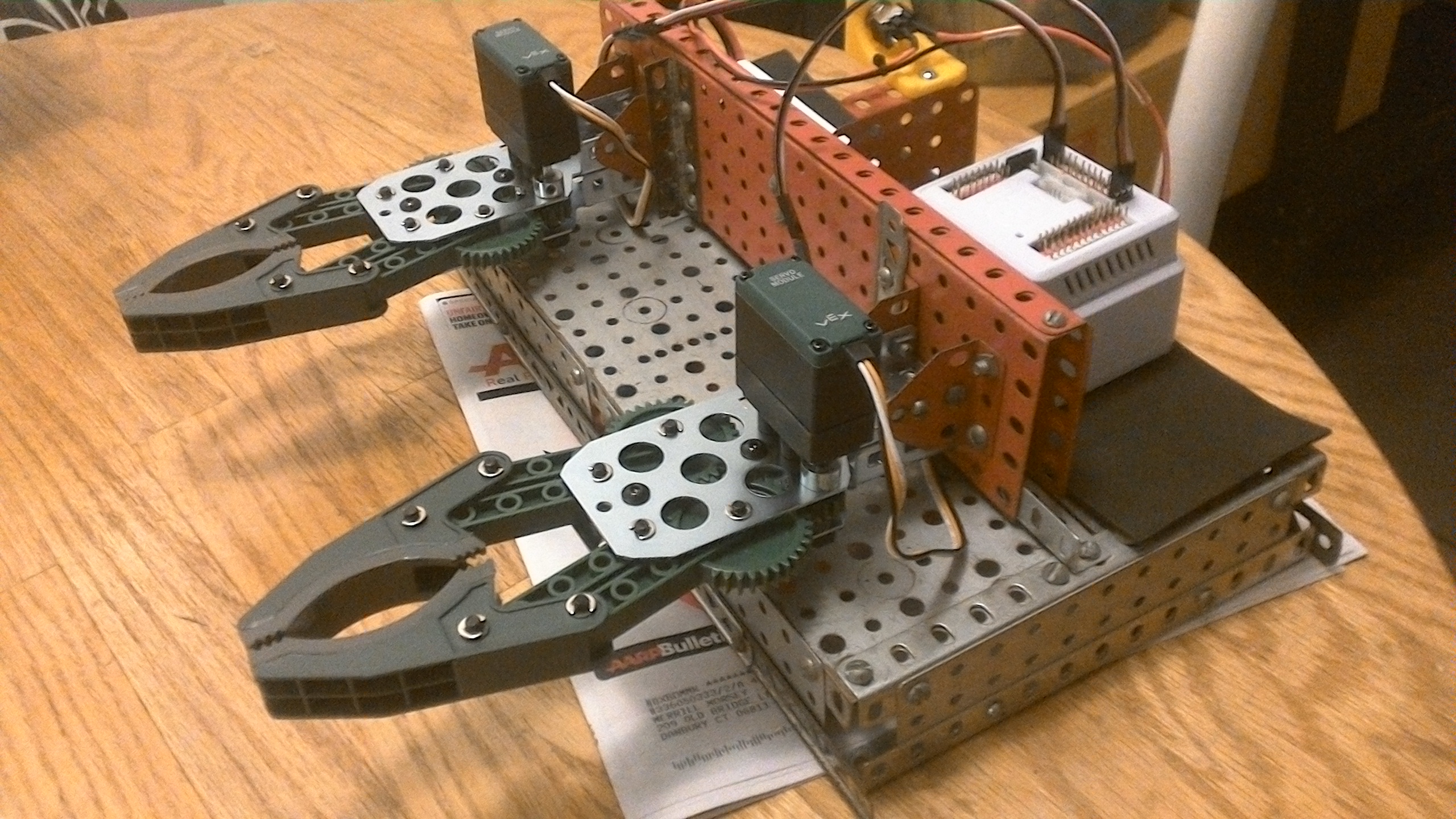
vexgrippertesting.EZBStarting to gripper sensor switches...
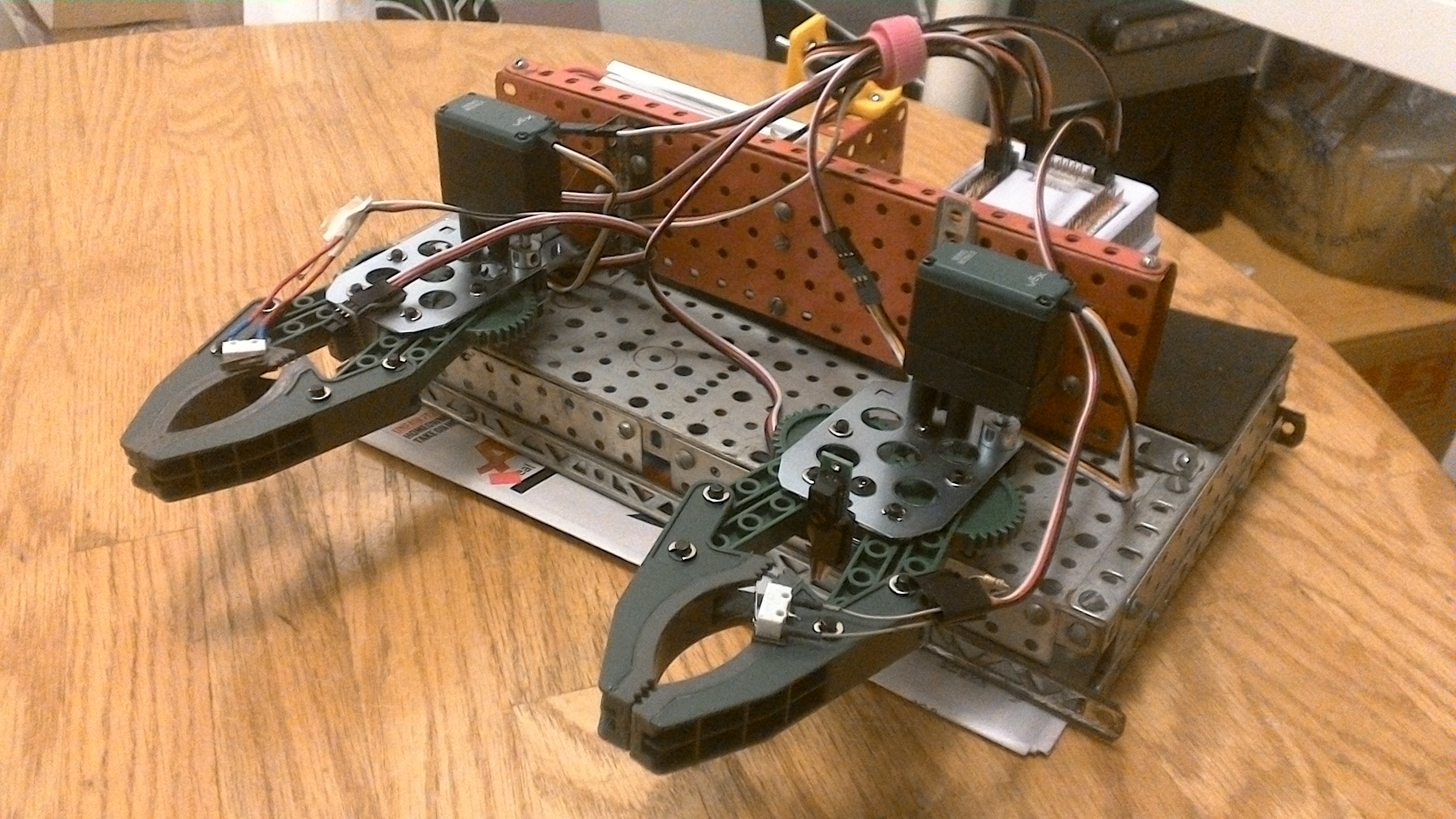
(anyone recognize the metal material the ripper are attached to?) vexgrippertesting.EZBSo I've now added a limit switch and an IR sensor to each gripper. The grippers are spring loaded, so the switch is to help stop the servo to prevent overheating. The ir sensor is simply gonna be used to indicate something is there to grip and to make it close. Still working on how to..