
wboyd
USA
Asked
— Edited
Using And H-Bridge 2.5 Amp Motor Controller To Control Stepper Motors?
Ok...I am trying this again - hopefully someone can help me figure it out...
I have a few of these little stepper motors and was wondering if anyone could shed some light on compatibility with the 2.5 amp motor controller...or any other controller. Here is the data sheet;
https://www.nmbtc.com/pm-step-motors/engineering/pdf/Drive-Circuitry-and-Wiring.pdf
The motors are Pm355-048-snc9 versions - they are housed in an older polycom/sony pan/tilt camera mount. I was hoping that I might be able to use a single h-bridge to control them, but I am thinking thinking that I might need two h-bridges (if that is possible on one EZ-B board)- one for pan and one for tilt.
Please help me figure this out....I am stumped!
Thanks, Wayne

Hi Wayne,
I too was hoping to find some way to control stepper motors with the EZ-B.
Bret,
I am going to start testing this weekend...I am using the following items;
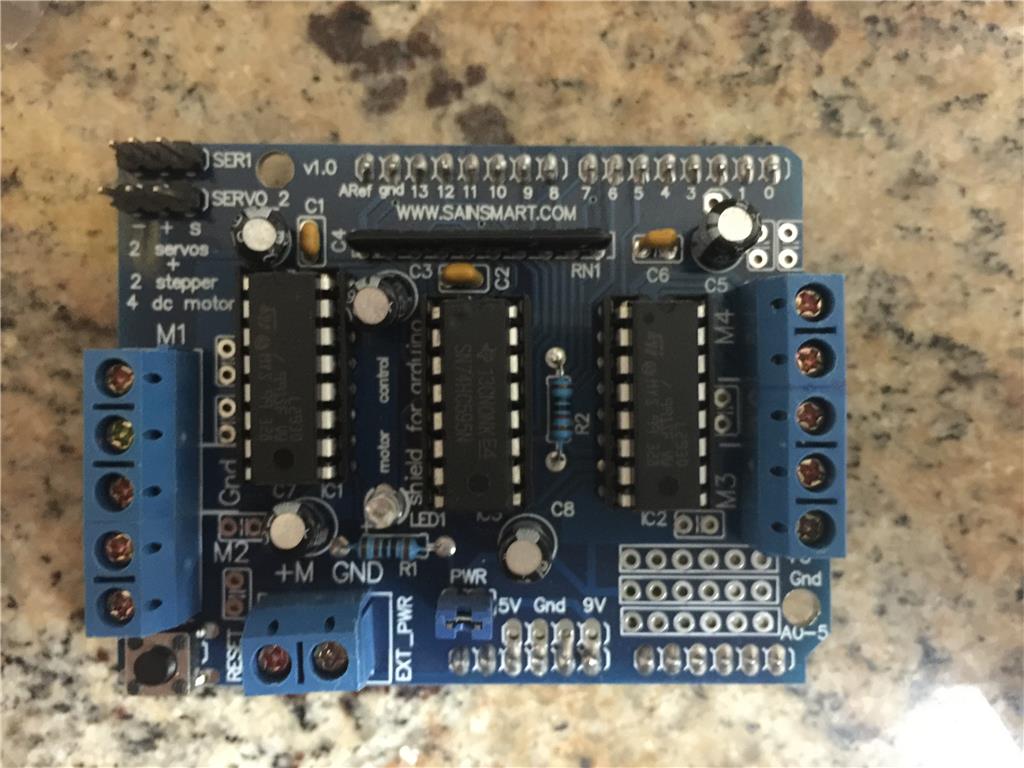
Standard L298 series H-Bridge Pm355-048-snc9 - pancake style (low profile) stepper motors - these are 4 wire uni/bi polar steppers.
I am pretty sure that I can make it work, but I think that it will take 1 H-Bridge board for 1 motor (was hoping to control 2 motors)
I will try and report back with my findings when I finish.
Thanks, Wayne
I do not know anything about stepper motors, but I have often seen motor controllers that say that they will control either one stepper motor, or two brushed motors. It is my assumption that they need two sets of inputs. I realize this is not much help, but it is just an observation.
Looking forward to seeing what you come up with. I was thinking about using one of these motors at one time. Thanks for threading where angels fear to tread.
Hello @wboyd
To control a stepper motor with an L298 2.5 amp motor driver (which is a Dual H-bridge chip) you'll indeed need one Motor driver board per stepper. You see steppers have two coils in them (Unipolar stepper have center taps on each coil that can be ignored and used like bi-polar steppers) and each coil needs to be driven by an H-bridge. As @Danger! mentioned, the nice thing about the L298 is that it has two H-bridges inside (2 channels) so you can drive 1 stepper motor (2 coils) or 2 DC motors (1 coil each).
Once you have each output of the L298 connected to a coil on the stepper motor, you'll then need to energize each coil in a proper sequence to make the motor "step". This link has a some good info on making that happen.
For example your EZ-Script would look like this:
*Edit: To figure out which stepper motor wires to connect to the outputs of the 2.5amp motor driver use an ohmmeter and find which wires seem to be shorted together (low resistance), there should be two pairs. Hook up each pair to one of the motor driver outputs, and don't worry it doesn't matter which pair goes to which output since the stepping sequence is a loop. Oh and I forgot to mention that the reason why you can use the 2.5amp motor driver with steppers is that they can handle the current requirements of each coil of the stepper which is usually 1amp.
Please note: that steppers like to have higher voltages (12-24VDC) for them to have stronger cogging effect and even though the L298 can drive more than the 1amp per coil needed, the heatsink will still get quite hot on the board so be careful not to touch it.
@skater, Thanks so much for explaining this topic so clearly ...and....providing some script!
Oooh new info for me to learn I always wondered about stepper motors and now I know
I always wondered about stepper motors and now I know
I thought as much...but was not exactly sure. I have used steppers with arduino projects, but was not sure about the EZ-B. But thanks - like I said, I am going to play with it this weekend. The project is controlling a pan/tilt device in an old Polycom ViewStation device. It uses 2 "pancake" (flat) stepper motors. What I really like about it is that the gearing makes the pan/tilt motion very fluid, plus it just looks cool...could make a nice "head" for a bot. I was able to get a few of these for free...(check link). I am actually just using the camera portion - it detaches from the base. I will try and post some pics when I get a chance.
Thanks, Wayne www.google.com/search?q=polycom+viewstation&rlz=1C1CHFX_enUS531US535&espv=210&es_sm=93&tbm=vid&source=lnms&sa=X&ei=dI3ZUpGGLMKVygG5rYH4AQ&ved=0CAwQ_AUoAA&biw=1920&bih=1085&dpr=1