
Tracking And Servos Need Help
I'm working on a product that requires tracking with two sets of servos. One set the camera is attached to and moves left and right and the other up and down (X and Y). I have another set of servos also X and Y that i want to follow or shadow the same motion as the camera servos.
I've tried everything in EZB that I could think of to try and get this to work. I added multiservo within the setup of the tracking to no avail. I end up with the shadow servos barely moving or moving to an extreme position and staying there. I need to understand the ratio setting better, but I tried all types of numbers and fractions and still no results. I also tried relative servo and got the same results. They seem similar and I think they were basically doing the same thing as in the tracking window.
Its pretty important that i get this to work. Even if i have to create (ha i mean copy) a script to get the function

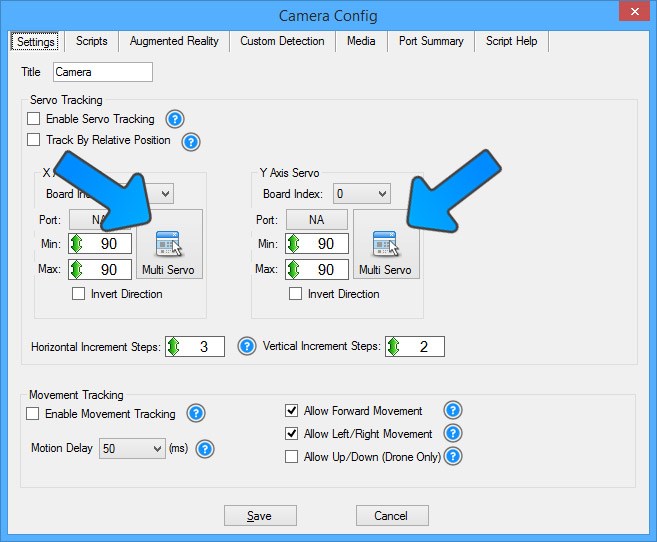
Have you pushed the MUTLI servo button when selecting the servo?
Yeah. I set up my other servos in multiservo, but all i get is the servos going to an extreme position, like max in the x and do not move. I'm not sure how the ratio works. But i tries 1:1, 1:2 etc, and even tried fractions ie .5
I can see the other servoes move now. But ever so slowly. How can if make the shadow servos move twice or three times faster. Can I use ratio. How does this multiplier work?
Multiplier of 1 is perfect
Make sure you set the Max and Min values. So that Max is greater than MIN.
Yup all done correctly. Double checked everything. The motion is very slight compared to the bigger motion of the camera servos. I was hoping for a multiplier that would allow the slave servos to move faster or slower than the master.
Are you sure the servo is working?
Can you screenshot me your Multi servo window?
Yeah the servos are working. I have them set up on servo pad and they work fine. My eyes are crossed been working all day and computers off. I will snap a screen shot of the multiservo tomorrow. thanks for the help tonight.
Does the multi servo work with a horizontal servo control?