mecizeldec
Tracked Robot - Mobile Controls
Hello Everyone! New to the platform, please forgive me if these questions have very obvious answers.
I'm incorporating the EZ Platform into a tracked robot. https://www.thingiverse.com/thing:1240754 The EZ Platform looks like a perfect platform to shoehorn in. (Camera support, mobile support, etc)
I've got the bot built, and it's pretty sweet. (I'll upload a video link soon)
I have some major questions though.
Current Setup: Motors: 4 5v geared motors (connected 2 in series a side) Motor Controller: L298 Driver Brain: IoTiny (Beta) Battery: 3S Lipo 2200 mAh Mobile: iPhone 7+
Config: D0-D3 - Motor Outputs for the L298 (See L298 Truth table) D4-D5 - Motor PWM for EnA and EnB- Controls Track Speeds
Success! Using L298 Control with PWM sliders controlling the bot is pretty simple. Keyboard control is crisp, PWM sliders work fine manually. Control is jerky but entirely functional.
Challenges
Mobile Controls! - My Mobile Interface does not present any options for proper touch controls. Having to manually stop both the turn movements and the forward reverse (Toggle) is incredibly cumbersome. I'm sure there's a way to script the buttons with a WhilePressed function (or something similar), but I wasn't able to find it.
Scripting! - Basic tracked robot controls are jerky. Base control for movement isn't analog. Ideally would like to write a differential script for controlling the PWM output for both sides. Example (Basic Idea, Pardon my NEWB arduino code )
Define Turnslider = $RightLeftSliderValue
Define Throttle = $UpDownSliderValue
Define Lspeed
Define Rspeed
init loop{
if Turnslider => 55elseif Turnslider =< 45else$PWMLeft = Lspeed
$PWMRight=Rspeed
}
)
Define Turnslider = $RightLeftSliderValue
Define Throttle = $UpDownSliderValue
Define Lspeed
Define Rspeed
init loop{
if Turnslider => 55elseif Turnslider =< 45else$PWMLeft = Lspeed
$PWMRight=Rspeed
}
Ultimately I think I just need more experience with scripting with ARC, but the mobile controls don't seem to lend themselves to manual control in this situation.
Any tips/assistance you can offer would be greatly appreciated!
Thanks!

Hi!
Don't worry, people with arduino experience have the most trouble grasping the simplicity of ez-robot because it's, well, easy So you can be productive and create something impressive.
So you can be productive and create something impressive.
ARC uses the concept of MOVEMENT PANELS. A Movement Panel is how your robot knows to how to move. Movement panels can be animated GAIT for humanoids/hexapods or even HBridge. In your case, you want the HBridge PWM Movement panel.
Remove everything you did manually with PWM, because this isn't Arduino and the controls take care of everything for you . Here is the HBridge Control you need: https://synthiam.com/Tutorials/Help.aspx?id=192
. Here is the HBridge Control you need: https://synthiam.com/Tutorials/Help.aspx?id=192
Now, once you have that working, the EZ-Script commands: Forward(), Left(), Right(), Stop(), Reverse(), etc... will magically work everywhere you use them. That means you can add a speech recognition control and it will just magically start working: https://synthiam.com/Tutorials/Help.aspx?id=90
Or you can add a joystick control and boom, it works: https://synthiam.com/Tutorials/Help.aspx?id=43
Or you can add a mobile interface control and use the Forward(), etc commands on the buttons: https://synthiam.com/Tutorials/Help.aspx?id=196
If you're wanting to add dynamic speed control on the Mobile Interface that you create, simply add Sliders to the mobile interface, one for each track. Edit the code to SetSpeed() or PWM(), which ever you prefer.
Or if add more directional buttons to change the speed
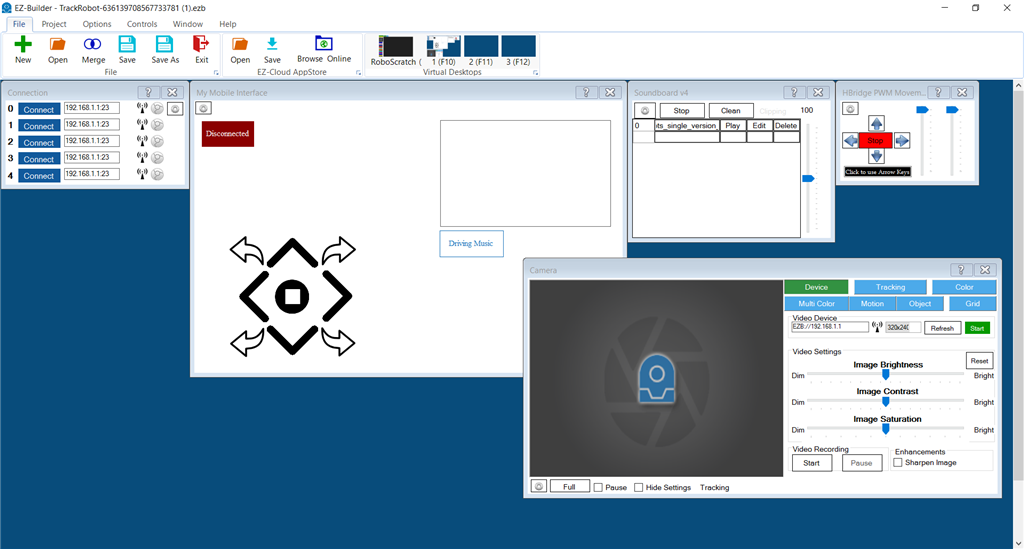
Here, i made this for you: TrackRobot.EZB
Download and save it
Load the project
Edit the HBridge control to specify your wires and PWM connections
Load it on your phone
*Note: You may wish to adjust the speed of the PWM in each button and the Connection Control's Init Script as i set them all for 255
*Oops, first version of TrackRobot.EZB that i uploaded had an error. Fixed
DJ Thanks for the reply!
I'm still seeing the controls as toggle buttons (Hence the stop button). This makes finesse control of a tanked bot quite difficult. I was honestly hoping for some sort of analog control, that returns to centre when released.
I can see using the slider for the turn ratio, I just wasn't sure how to have it decide which side to slow down. (Hence the previous if statement)
Any chance I could use a mobile joystick control, or a touch pad or something?
###Update - iOS - H Bridge control works (as toggle buttons) but the custom buttons aren't functioning. Also Clicking on the connection manager (top left) crashes the program.
YEah - there's no analog control for mobile yet. Although you can get creative with sliders or the servo pad.
An analog joystick style control is on the Todo list for those wanting to remote control robots.
In the meantime, try out some robot feature. Like speech recognition and camera detection, tracking, etc. That's where the fun begins
Ensure you have the latest ARC on your mobile device. Old iOS devices may have issues processing the data. Any newer iOS device will be rock solid for processing... although, apple hasn't been on the top of my favorites list these days. Have fun!
Oooo, the direction buttons don't work because i uploaded the wrong project when i said i fixed it in a previous response... my bad stress! Here's the correct project: TrackRobot.EZB
*Note: i had Speed() instead of SetSpeed() in the direction buttons
What about accelerometer access on the phone? Is that currently possible? Could tie the pan and tilt of the phone to control the bot. This would be awesome in conjection with the camera on the front of the machine.
Seems overkill for this, but down the road I'll be looking to use something similar to a Google cardboard to control the head of my InMoov. I was really hoping to have a bit more granular access to components. (Dream, Create, Excel!)
(Dream, Create, Excel!)
Do you have a scripting guide or reference doc to assist with code integration? My partner's a comSCI major just itching to push the envelope on the inmoov.
:)