Asked
— Edited
Test The Proper Functionality Of JD Humanoid Robot
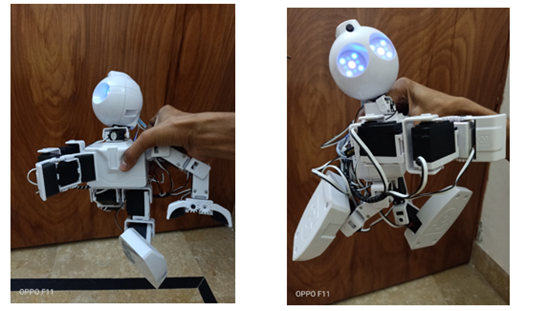
How I can I test the proper functionality of my JD humanoid because sometimes its motion was unexpected like for singing song it revolves its hand from front side and hit his head badly, sometimes its hands does not wave properly, it does not do sit and stand properly how I test all the functionality so that every part is properly working? the connection is 100 % Ok, initially, it was working properly but with time I am facing these issues how I test my JD humanoid? Attached are some Abnormal functionalities images. [url=https://synthiam.com/uploads/user/2D188C79854E15088735FB6DE34D040D/c43kiyj2.png]

Related Hardware (view all EZB hardware)

JD Humanoid
by EZ-Robot
JD humanoid robot kit - WiFi-enabled, 16 DOF with metal-gear servos; easy, fun, educational, available from the EZ-Robot online store.
Wi-Fi / USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
24

Hi, I just saw your question
Looks like your servo profile is off
When you start, open a JD bare project, check the assembly of the robot, then check servo profile, you need to adjust servo, make sure your robot is stand correctly in alignment, then click the little gear item on auto position, go to calibrate, make sure all the servos are at the 90 degree position
try that, let me know
Ezrobot has great tutorials on their website to get their products running. I even co-host a few of the episodes . Take a look here: https://synthiam.com/Tutorials/
. Take a look here: https://synthiam.com/Tutorials/
I’d say the connectors for the servos are melt likely in the wrong spots. And azang may be right about the servo profile - if you created one that’s way out of scope and ignored the errors
and make sure you’re using the latest ARC, not one from may 2019
when calibrated correctly,the robot chould be standing like in the picture.