
leonardo46
Italy
Asked
— Edited
Talk Servo. The Mouth Remains Open After Speaking
I added a mouth to my robot. I'm trying to let it move while speaking. I tried with "talk servo" and speak synthesis. It works, but I found 2 problems:
- at the end of the sentence the mouth always remains open. servo positions are : min =110 (mouth closed), max=140 (mouth open). I tried checking "invert" in the talk servo configuration window, but this way it doesn't move at all. How should "invert" be used ? Can I in some way force the mouth closed at the end of the sentence,?
- For long sentences the mouth stops moving well before the sentence ends. The sync between speech and servo movement is not good. Could it be made better ? Sound servo with Soundboard v4 might give better results ?

ERRATA CORRIGE: 110= mouth open,140=mouth closed
Hi, community. Nobody replied. In the meantime I found myself the solution to problem 1). I don't need anymore help for this problem. The solution is: For getting the mouth closed at the end of the sentence, I had to check the "invert" box in talk servo window. I discovered that this option only works if min is <90 and max is >90. So I had to fit the servo bracket accordingly.
I still need help for sync between speech and mouth movements (problem 2). With short sentences (1-2 words) it's OK, but for longer sentences (10 words) the mouth keeps moving for seconds even if the speech has ended, or viceversa, the mouth stops moving before the speech ends. It's different for different sentences, In an apparently unpredictable way. Any solution ?
you got it! Minimum is always less than maximum as per the definition of the words. For more information, see this tutorial: https://synthiam.com/Tutorials/Lesson/49
Also, you may have to be patient and give the community more than a few hours to answer a question.
OK, DJ. All OK about open/close mouth , invert etc. I'll be more patient. Usually community members reply very quickly. This time I was quicker than them !
What about the problem 2) ? Why is there a large and unpredictable (for me) difference between duration of speech and duration of servo movement ? For some sentences servo stops much before speech ends, for others it goes on moving a long time after speech has ended. How to control this phenomenon ?
@lornardo46, which add project are you using for your speech to move the mouth? Can you post a sample project to help understand you issue?
Thx
I'm posting my project.
The problem is in speech synthesis and talk servo, that moves the robot mouth, following the speech. There are three sentences. For the first sentence , the mouth is rather synchronised with the speech. For the other, shorter , sentences the mouth keeps moving even if the speech has ended. This probably may be adjiusted setting the delays in the talk servo configuration window, but this setting is unique for all sentences. How to achieve a good sync for all sentences ?roby.EZB
@Lorn, I will look at this tonight, currently working long and weird hours. Thanks for your patience.
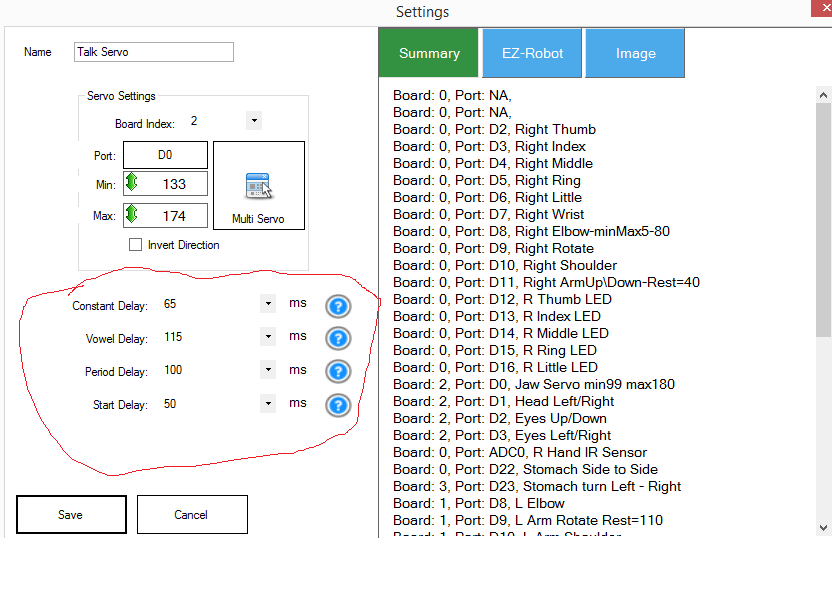
@Lorn, what type of robot is this? I have an Inmoov and do not use the inverted on the servo in the Talk Servo. Here is a picture of my settings.
I used the 3 robot laws from iRobot to set my mouth movement. I had to play with each settings to get it to stop every time my robot said the 3 laws, after that most any small or large words seems to work. It might be because you servo is inverted or, not sure?
here is my 3 laws... put this in a script to run.
You have to play with each of the setting in the red circled settings to get it right. Remember there is a Question "?" on each of the settings in the Talk servo config to tell you what each one does.
Can you put the speech that you have on many Speech Synthesis in you Speech Recognition, that way you can use the "SayWait command? Using the SayWait command allows the speech to finish before starting a different command thread.
It would help to see a picture of the mouth to get a better idea as to how it's driven.
Hope this helps, maybe other we also make suggestion too.
Cheers,