
jeff7457
USA
Asked
— Edited
T-Hex With Ez-B
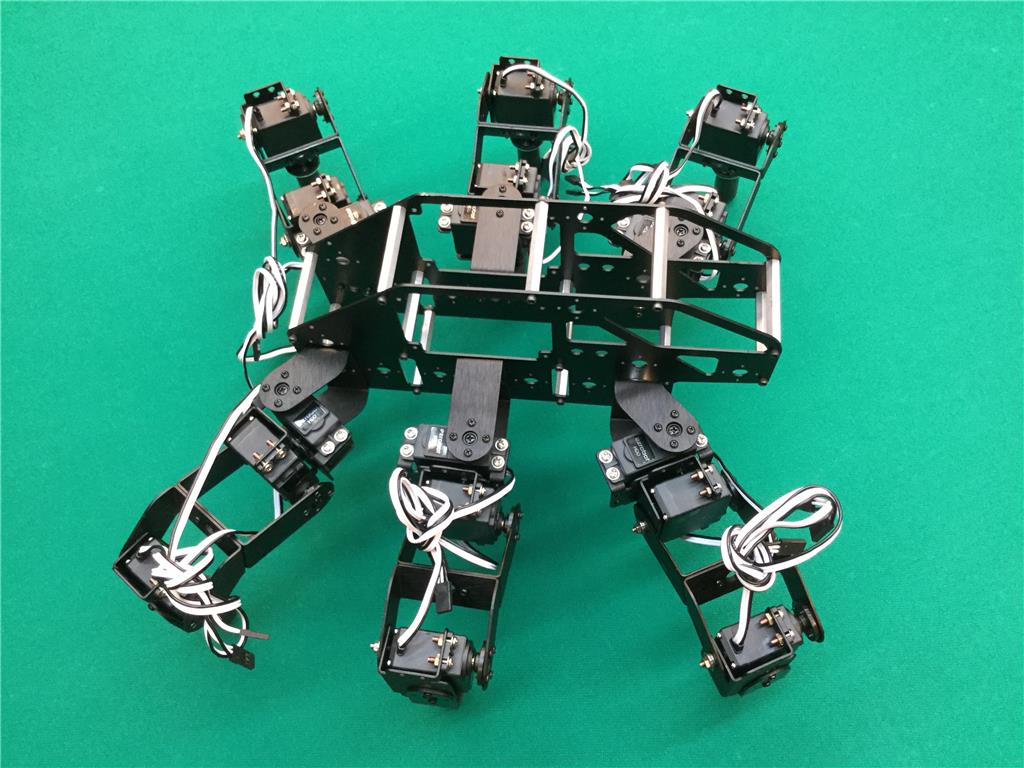
I am building my first bot. Wish me luck. Lol. I have a T-hex 3 DOF chassis with EZ-Robots HDD servos and plan to use the EZ-B as the controller. I have the EZ-B v4/2 Developer Kit on the way. Will the EZ-B be able to handle the current draw of the 6 additional servos? I am no stranger to RC or drones and thought this would be a challenging project.
Thanks, Jeff

Dear Jeff, nice robot! you can use 24 Servos at the same time. all what you need is a good lipo battery or an modular power supply with enough Ampere. a powerful low-budget computer and W-LAN Connection make sure that all work perfectly.
Jeff, I built a Hexapod called Ziggy’ with 3 DOF with 20 servos in total counting the head movement Servos. You do need a good battery, it’s a heavy current drain on the battery. I have two one for the EB-Z controller and the other for the Servos.
See my posting I did a while ago:
https://synthiam.com/Community/Questions/10864
Enjoy your build and working with the EB-Z controllers, there GREAT!
Thanks Smarty.
I have lipo batteries and chargers that I use for my drones so I am familiar with batteries. I have a laptop, iPad, and Android tablet to utilize for this project.
cem I have seen your post on Ziggy and that is why I picked up the T-hex. I also plan to run a dual battery setup in hope of preventing controller brownouts. I also plan on putting the camera on a pan/tilt set up. Looking forward to using the EZ-B controller. Seemed like the best solution for a beginner. I also am planning to build an R2D2.
Hi @jeff7457! Welcome! Good Luck- but it doesn't seem like you really need it
Thank you Chelsea for the vote of confidence. The easy part is done. I am waiting on the EZ-B to arrive to start the real work. I've also ordered a Hasbro R2D2 and want to get that converted to a working robot. Big star wars fan.
Lots of Star Wars fans here! Any special plans with the T-Hex?
Any special plans with the T-Hex?
I really like that T-Hex frame. I made one similar of wood a few years back before I knew about the EZB controller. Makes me want to revisit it but this time with the HDD servos and the EZB Controller.
Wow @rz90208 that is really cool! I am very taken with the idea of using organic materials - were there any unexpected challenges besides the weight?