jbrawley9906
Simple Servo Control And Adjustments Help
Hello,
My name is Justin and I am completely new to EZ-Robot. I have searched tutorials and all im looking for right now is how to hook up servos and adjust its movement and speed and how to control those servos with the myo armband. I have been working on 3D printed hands and donating them to amputees. I came across Ez-Bv4 and wanted to experiment with implementing this as opposed to just using the arduinio boards because for the price with all the functions it has it seemed like it was definitely worth checking out. So the question is right now I just want to hook up five servos for fingers, possibly 6 (extra for wrist movement) and how to assign controls to tell the servos what to do from the myo armband and also how to move the servos through mobile. Any help by listing a tutorial or even someone else personal experience would be greatly appreciated.
Thanks in advanced,

Welcome!
If you are not familiar with EZB (Hardware) and/or ARC (Software) there are a lot of tutorials here:
https://synthiam.com/Tutorials/UserTutorials/
if you want to go straight to the ARC's Myo Control: https://synthiam.com/Tutorials/Help.aspx?id=206
ptp,
thanks for your reply and I have been looking at the tutorials but not really finding anything based on just hooking up servos and assigning them functions.
The EZB Controller has 24 digital ports (D0-D23), all digital ports can be used to connect an analog Servo.
You can control the Servos:
ARC Controls e.g.: Auto-positon, Servo-Pad, Sound Servo, Myo Control
ARC EZScript Scripting e.g.:
The Learn section is huge (videos, text), can you tell what are you missing ?
Ok i can hook up a servo and get it moving with the mouse. but how do i set functions for each specific servo for example with the myo armband i want servo 1 and 2 to move in a specific direction when i make a fist. or make servo 3 and 4 open/close when tap finger twice etc. or how do i get servo 1 and 2 to do specific movements by pushing up button on mobile app etc. i have not found any tutorials on how to assign specific functions to specific gestures or directional pads on a mobile app if this makes sense. I have no programming knowledge as this is why i wanted to experiment with ezbv4 as i was under the impression it is a simple based option for those of us who do not know how to program
It should be actually fairly simple... Here is a tutorial that should guide you through the whole process!
Have fun, this board and the piece of software that comes with it is really awesome, have fun!
https://synthiam.com/Support?id=206
Edit Ups....sorry!
did you watch the Myo Control Tutorial video ?
https://synthiam.com/Tutorials/Help.aspx?id=206
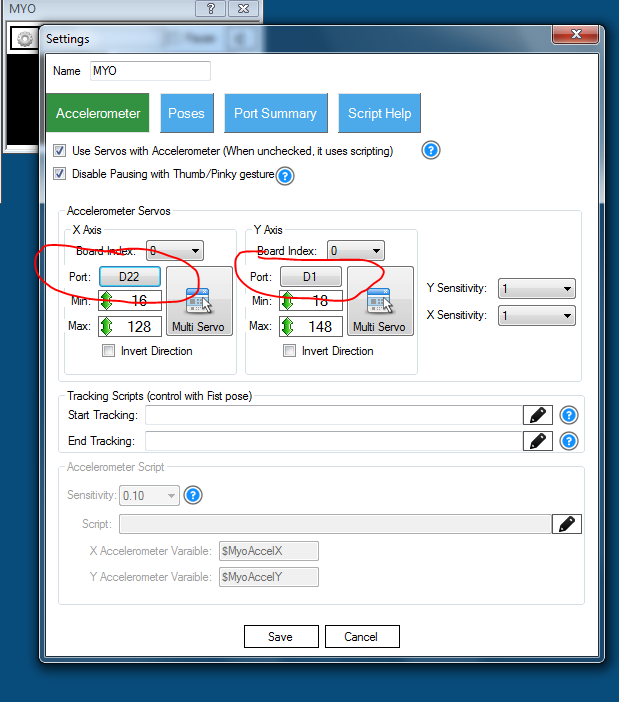
Configuring Servos for the Myo Accelerometer:
Myo Poses:
Script for a specific Myo Pose:
No development skills required... YET
Neatly explained @ptp...sorry for pointing out the same tutorial that you just linked in your thread!
Yes, I have labeled as you stated. for example you have servo d22, 90 listed i will input my own servo and number and when i close fist it will go into postion and just stay there it will not return to position meaning it will just stayed closed. i even did fist servo(d0, 180)
then under open servo(d0, 23)
to stimulate close and open hand
but still did not work