
ezrobot3
Singapore
Asked
— Edited
Servo Positioning
Hi everyone,
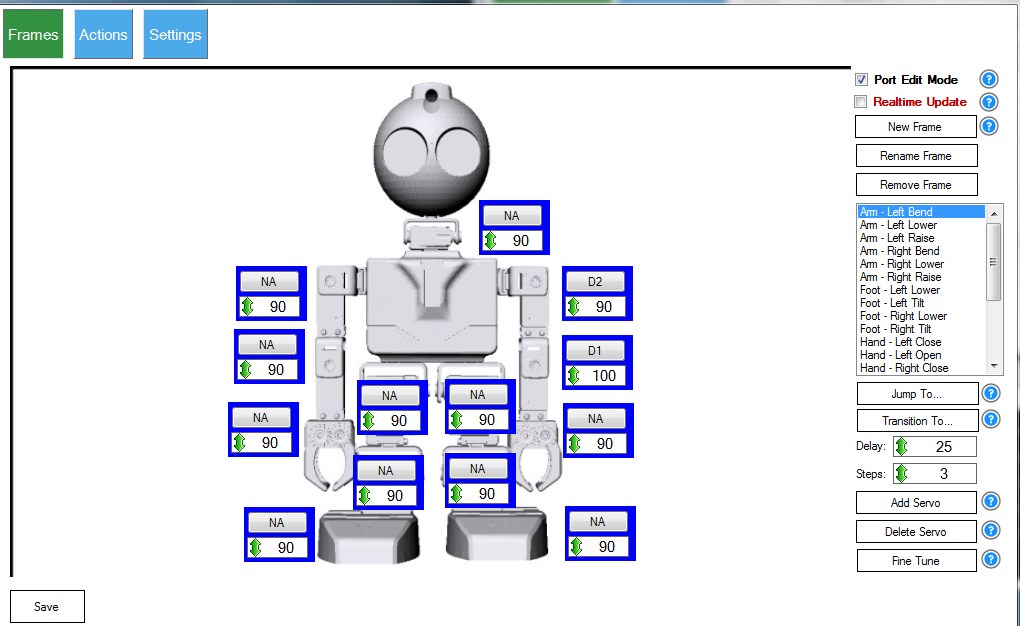
I am using the Auto Positioning control in ARC and I have a few queries.
For the position 90, would it mean that it is the default position of the servo? ie. we use the servo of the arm for an example. 90 at rest, 1 would be moving behind, 180 would be to raise it
And another question, for the servo of the head, the position would be to just move the head upwards and downwards am I right? If so, how would I be able to make it rotate left and right?
Thanks everyone

It depends where the servo is positioned when you attach the horn.
90 is centre. 0 is full one way and 180 full the other
Hi @ezrobot3
In order to make the head move left and right you'll just need to add another servo (you can position it beside JD's head). There is a servo inside JD's head that allows it to move left and right.
hi i use a copie on my desk.
Thank you all for the guidance!