
Asked
— Edited
Saber Tooth Connection Question
I have already asked and got an answer for this but just noticed that the saber tooth help page says something different. Quote: The EZ-B connects to the GND, +5 and Signal to the Sabertooth. The Signal from the EZ-B connects to S1 on the Sabertooth.
Got that the signal goes to s1 but then there r the other 2 that are different.

This is how I have been told how to set it up. but the page says I need to connect Gnd and +5 too.
synthiam.com/Tutorials/Help.aspx?id=173
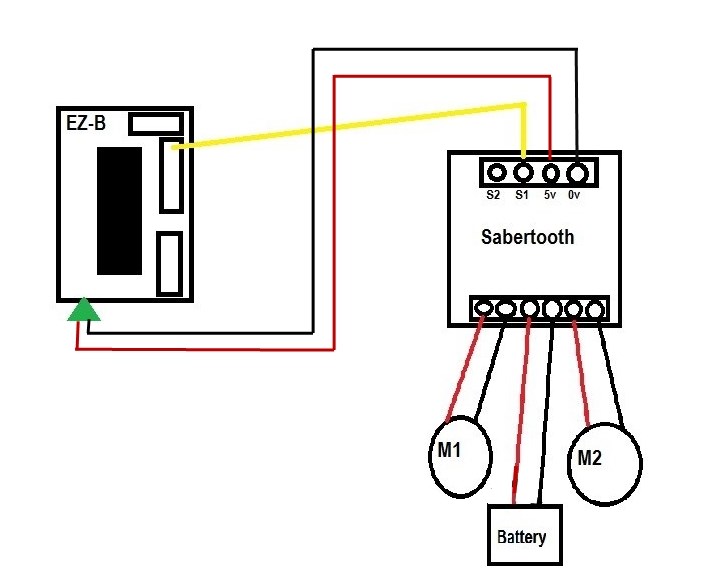
Yes, connect Ground & +5V from the EZ-B to the 5V and 0V to the right of S1
If you use the 5V and GND on the Sabertooth then this is how you hook it up....
That's good to know if it is as your image, I certainly wouldn't have thought that until you posted it. The tutorial page I read as saying to use the +5, Gnd & Signal from a Digital port to +5V, Gnd and S1... I guess I interpreted it wrongly?
But, wouldn't that only feed the EZ-B +5V, which may be within it's limits but only barely...
I hooked up a different motor cotroller that way, and then I noticed that when I unplugged the EZ-B it was still on. The 12V feeding the controller was outputting 5V from the controller to the EZ-B. After that I just connected the common ground and that was it.
Yeah, the Sabertooth has 5V BEC output specifically so that it can power micro-controllers.
As far as 5V being within the EZ-B limits, I would think as long as it provides a constant 5V it should be fine, since the power input voltage regulators on the EZ-B drop whatever you are feeding it to 5V anyway, and throw the rest away as waste heat.
I am planning on feeding 24V into my Sabertooth (driving 24V wheelchair motors) and then use the 5V Bec to power the EZ-B. The Sabertooth has a bigger heat synch, so I will let it handle dropping the voltage for the EZ-B.
Alan
I don't know too much about this, and this may be a dumb comment, but if the 5V output from Sabertooth is connected to the 5V output on the EZ-B, is it even going though the regulator on the EZ-B? I would think that the regulator would be between the barrell jack an the 5V circuit. That is why I disconnected mine. I was afraid of damaging something.
Of course that's not to say that you couldn't power EZ-B off of it. I would think that you would need to disconnect the EZ-B power source.