
cauld
Rover 5 Chassis Help
Hello everyone,
I recently purchased a new EZ-Robot kit with the Rover 5 chassis and the 2.5 Amp Motor Controller. I need some help hooking up the Rover 5 chassis to my EZ-B. I've read the docs and watched DJ's video tutorial and studied the diagram found here numerous times - synthiam.com/Tutorials/Hardware.aspx?id=25.
The video does the setup somewhat differently than the diagram. I started with the way the video does it, but when that didn't work for me I tried the setup as shown in the diagram. I have tripled checked everything and I still can't seem to get this working. I have power to the HBridge and to the EZ-B via the 6 AA battery adapter provided with the Rover. I've even tried using the adapter from the EZ-Robot kit. When I connect to EZ-B via ARC and add an HBridge controller nothing happens. I get no movement. Beginning to wonder if the Rover motors are bad, I doubt it, but not sure how I can test that at the moment. I put a standard servo on one of the other digital ports at the same time and that moves just fine.
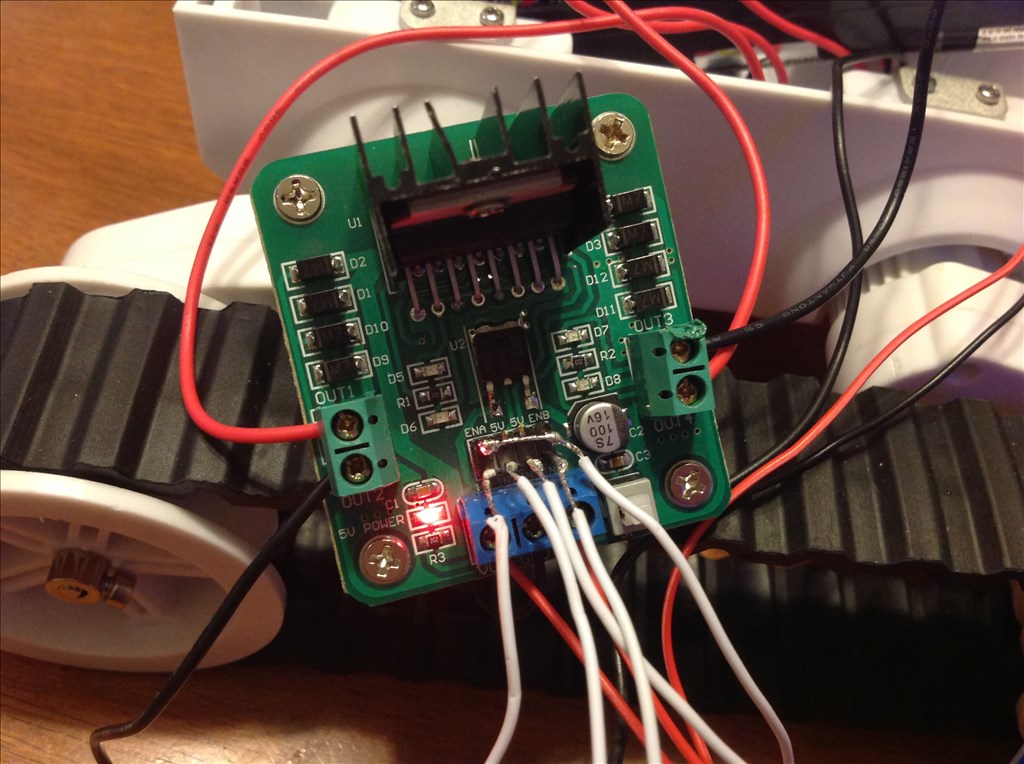
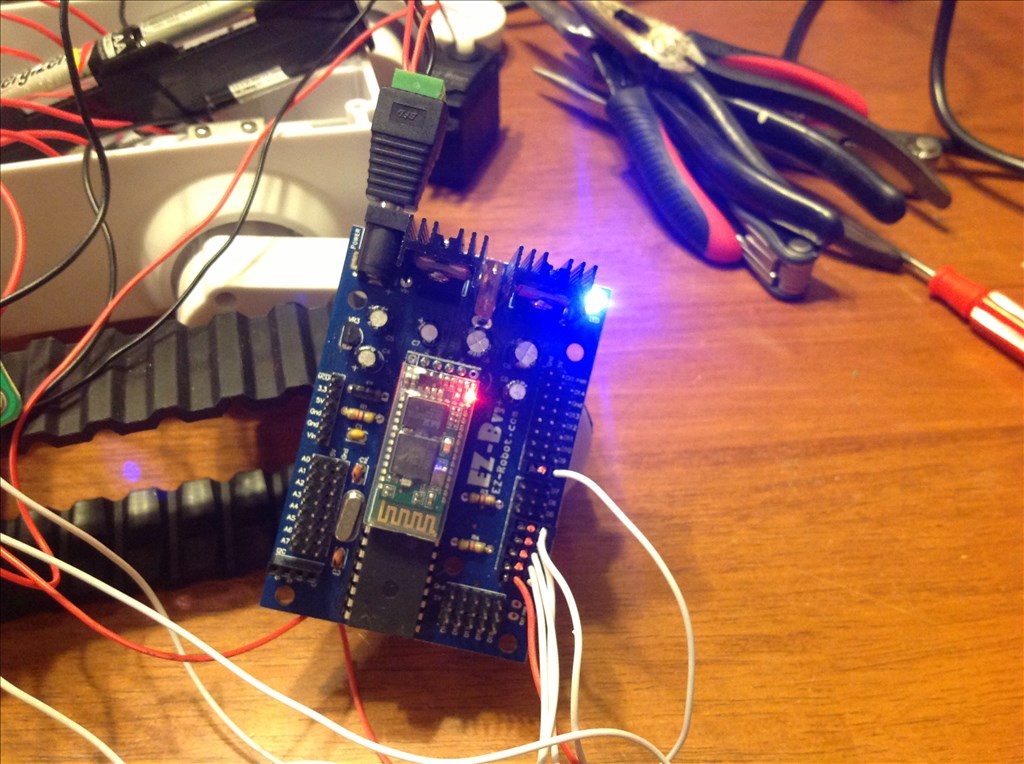
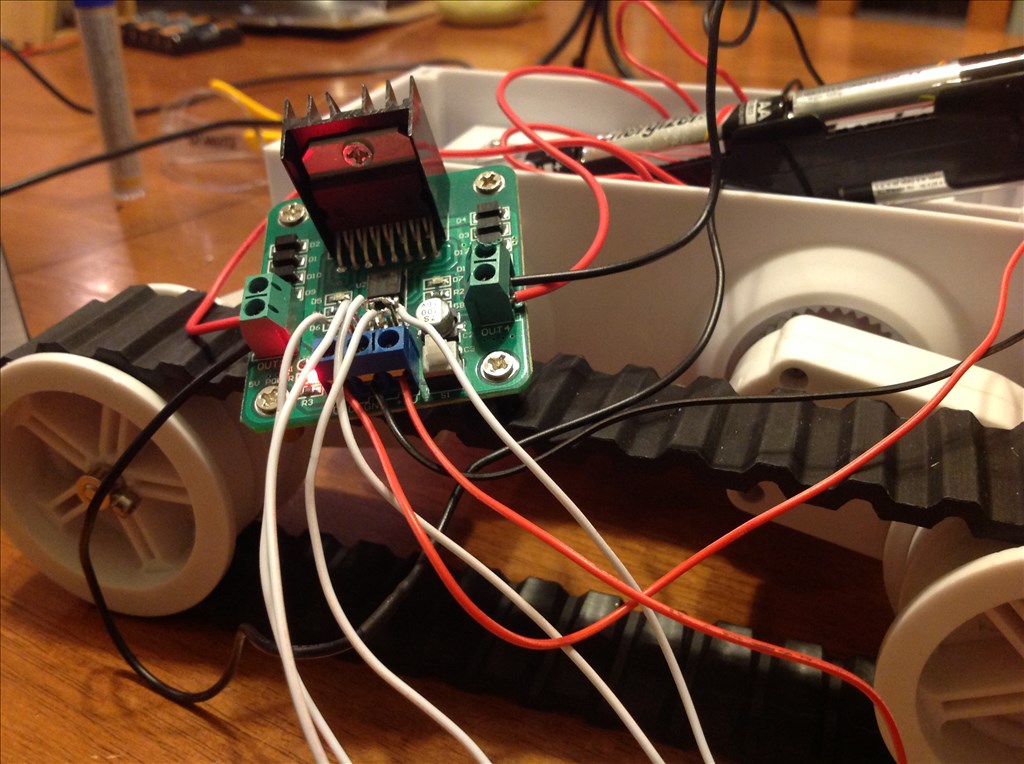
I am attaching a few pictures from my setup as it stands right now. Wondering if anyone here can take a look and see if they notice something I've messed up any/or offer some suggestions. I'm stumped. Thanks in advance!

Hello! Welcome to EZ Robot , we will help get you going. First off where did you get your h bridge? I ask because lately I have ordered direct from China ( not through ez robot) and consistently had something wrong , three h bridges in a row. You will want to make sure your signal wire (the white one) is not accidentally plugged in backwards. In a event like this its best to check one piece at a time. Try each motor with direct power....do they work yes/no , if yes then using a meter will be helpful the check the continuity of your connections. I myself used LEDs as indicators to see when each channel was activated. Just as a test. Try those and report back. Remember have fun , I forget to do this when things aren't easy - Josh S
- Josh S
Hey Josh,
Thanks for the reply. I bought the H bridge from the ez-robot store. I'll probably order a few more to have as spare, but for now this is the only one I've got. I doubled checked all the wires again. They all appear to be properly placed. I attempted to go back to the setup done in the video again. Still isn't working.
In ARC and have H Bridge & PWM controls. The H Bridge control appears to do nothing and when I move the PWM slider it appears to think it isn't connected. Even though I am connected to EZ-B over COM7. Here is the debug output...
Attempting connection on COM7 Connected to COM7 at 9600 EZ-B reports EZ-B Firmware V16 Connected
Now as soon as I move the PWM slider... Comm Err: Not Connected BbytesToExpect: 0
Received: Disconnected Comm Err: Not Connected BbytesToExpect: 0
I'm pretty new to the hardware side so sorry if this is a dumb question... how would I test each motor with direct power? The Rover 5 chassis motor wires originally had white plugs on the ends. I cut those off to get at the red & black wires to run into the motor 1 & 2 inputs on the H bridge. What would I wire those to just to test the motors? I am going to stop by the store in a bit to grab a meter so that I can check the continuity of the connections.
The wires coming from the outputs of the bridge are the power wires to the motor. Apply power directly and that will ensure those are functioning. Also using AA batteries may not be enough power to run the motors and ezb at the same time. I tested a rover once and they can draw 1 to 1.5 amps current on each motor so you may want to consider testing with a better battery or a desktop power supply rated for 5 amps @ 7 to 12v.
Hey Josh,
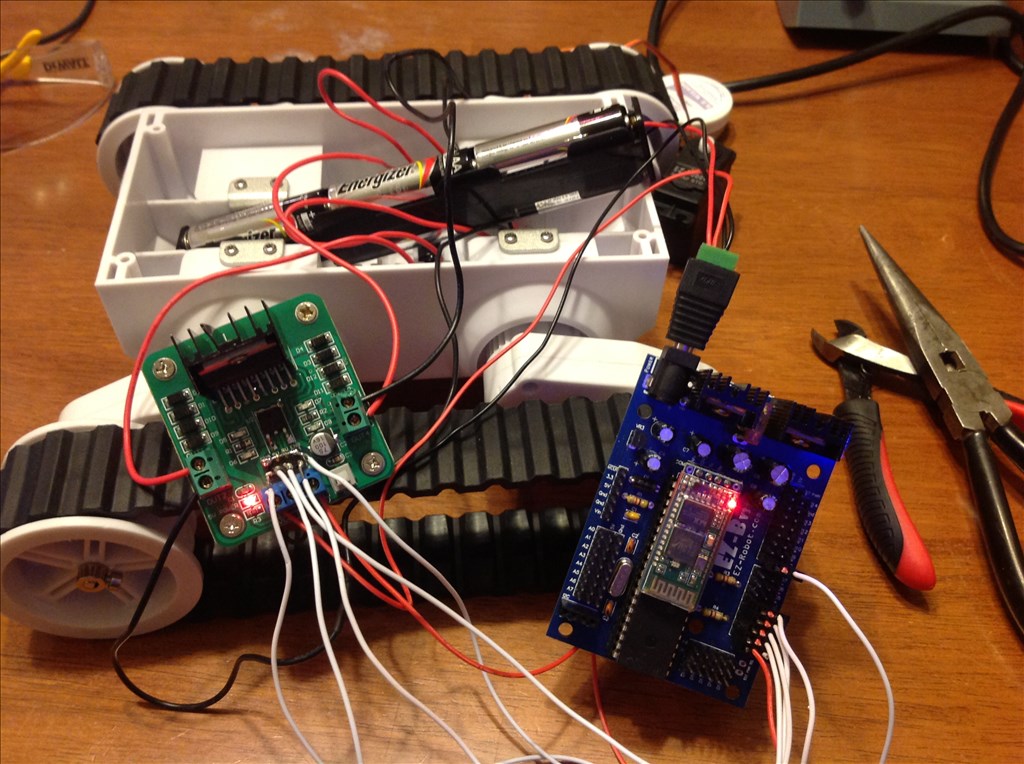
OK so I hooked up both Rover motors to direct power 1 by 1 and they both worked. So we know the motors are good. I also thought perhaps limited power could be an issue. I did have the Rover and EZ-B sharing the same 6 AA battery pack. I bought the Bench Power Supply from the EZ-Robot store as well. Unfortunately, the plug isn't made for US outlets. I check Radioshack and they didn't have an adapter that would work. I ordered one online yesterday, but it might not come for a few more days. However, I do have a 2nd 6 AA battery pack. Can I put the Rover on this and keep EZ-B on the other? Would that provide enough juice? I tried to do this by running the H Bridge VCC to the 2nd packs positive and the H Bridge GND to the 2nd packs negative. I kept the H Bridge +5V wired to D0 on the EZ-B as shown in the diagram. I had to push the white button on the H Bridge after everything was plugged in to get the H Bridge power light to come on, but I do have power to EZ-B and the H Bridge now. Unfortunately, this doesn't seem to have worked either. Attaching another picture of this double battery pack setup. I definitely want to have a portable power source like what the AA packs provide so if this setup will not work what other options do I have?
Also, I forgot to mention I got a multimeter and tested the connectivity of my connections. They seem to be ok.
Do you have a old PC power supply hanging around? If you ground the green wire to black from the power supply it powers on and gibes your regulated 12 volts and 5 volts. That could be a easy way to get a bench power supply. Its listed under one of my projects as a how to.. To answer your question about the battery. Lithium battery packs like a 2s or 3s are under 20 dollars and can support high current and a very long run time for your project.
Unfortunately, we recently moved and I got rid of a lot of my older hardware so no extra power supply laying around. The Lithium battery pack sounds like a good solution. Can you recommend a pack/charger setup that would well for this? Got a link? Thanks!
This is a 7.2v 2s battery https://www.hobbyking.com/hobbyking/store/__9368__Turnigy_1800mAh_2S_30C_Lipo_Pack.html