
Devo
USA
Asked
— Edited
Rover 5 Chassis
Hi, i recently recieved my robot kit but i dont know how to hook the rover 5 chasiss up to the ez b becouse the port it different. that is where you hook it up right? i dont know much at all any help?

VERY VERY first, READ ALL DOCUMENTS, TUTORIALS, AND WATCH ALL VIDEOS. More than once if needed. Then check to decide and see what you want to do. Then check your production value (servos,motors,eZB-Kit, etc.) Then collect the items and put the hardware together. Then do the programming or configuration.
good Luck!
Lol easy on the caps mel
Devo you need a h bridge. The rover draws too much to use directly from the ez board.
https://synthiam.com/Tutorials/Hardware.aspx?id=25
There is a video at the link I provided
Welcome Devo!
You could order up the 2.5 Amp Motor Controller, that will do the job for you. While waiting for that, try simulating rover movement using the modified servos and tires in order to learn the rest of the features of EZ-Robot.
Have fun and keep us updated... and ask any questions as we all try to assist when able. (and yes, check out all the tutorials and others projects for info as well )
)
@DJ I think there should be a small note added on the Rover 5 and other Wild Thumper chassis descriptions, stating that you need a motor controller to use them with the EZ-B... saves some frustration (and damage) on the part of a novice who might believe all required parts are in the kit. I know I didn't understand that fact myself when I first ordered my kit, not that it mattered as I didn't order any chassis at the time due to cost... but I am glad I did order the motor controller just in case... as it turned out I did need it on my 2nd robot
I have bought a rover 5, EZ B microcontroller and EZ B Wireless camera. The idea was to design a Robot for my Science Fair Project which needs to be done in the next month. I have spent way to much time trying to connect the two together. I see that I may need an H bridge but how does the rover 5's quadrature encoreder and dc white boxes actually plug into the EZ B. I understand that you can buy the dagu 4 Channel 5-12V, 2A Brushed DC Motor Controller:
Dagu 4 servo Controller
which is in a canadian seller (faster shipping) but can this be connected to the EZ B for best compatability to the Rover 5.
Please help and give as much detail as possible, I am new to building robotics and need as much help as possible doing this, becuase the main problem I have faced is that the rover 5 uses: 4 quadrature encoders (4 wires, grn, 5 volt, Sig A, Sig B) where as the EZ B uses 3 (gnd, 5 volt, and one signal). So far i cant connect these and need help learning proccess.
thanks
Hello Jen, the encoders are not needed. They are just there to estimate distance traveled but its not accurate. Just leave those unplugged. Did you get the 2 wheel drive version ( that's 2 motors) or the 4 wheel drive version ( 4 motors one for each wheel)
If you have the 2wd then you only need one h bridge and 4wd would need two. ( one h bridge can drive two motors)
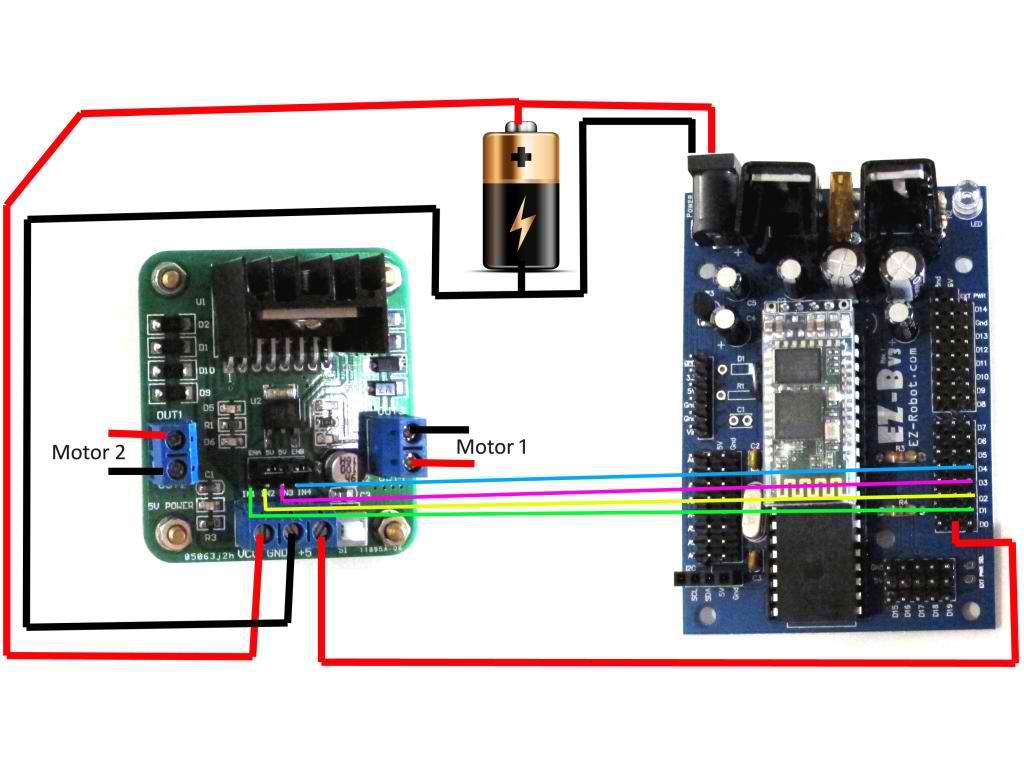
You will use 5 channels / ports from ezb. The first 4 are movement signals and 5th is the pwm control so you can adjust speed on any of the 4 movements. ( forward back left right)
Next get back to me on the version of the rover you have and we will go from there. I can draw a diagram and there's tutorial videos as well but I need to make sure we clarify your needs. Thanks - Josh S