
Roomba Connection
I recently purchased a EZ4 board and I was anxious to use it. I went through two cables (mini din to molex) both of them traced correctly but yet I got nothing when I went into ARC.
The camera functioned (although it appears to only take up half the image window), I could connect to the web server no problem, but not the Roomba (although it acted like it wanted to connect).
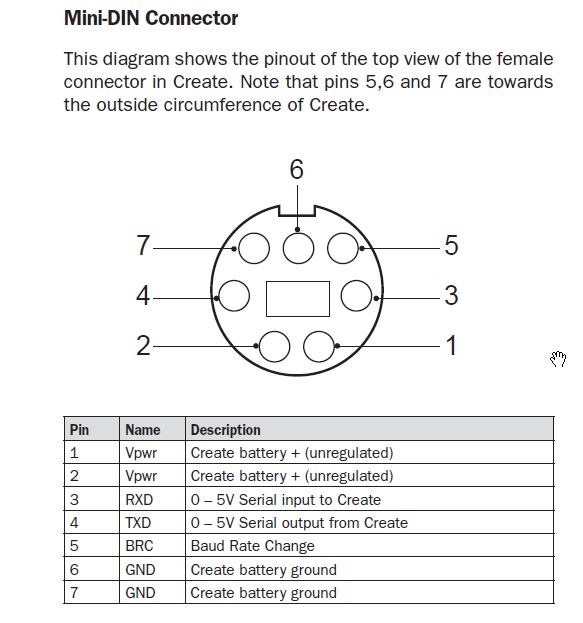
In your pin out you have two pins being used one is ground and one is sending 5 volts (pin 3) to the create. Which confuses me because the directions make note to measure the voltage coming from the cable however I believe pin 3 SENDS to the Roomba not receives, am I misunderstanding?
My last attempt I took a PS2 cable put a meter lead on the pins you mentioned and then on the bare wire, until I had a complete connection. I attached those two to a molex connector with servo wire double checked the connections and still nada.
Help? stress tired

Is there something blocking the camera lens? Piece of plastic or?
Richard old friend, you just may be a genius ... (nothing blocking the lens I can see so far, checked that first but I'll double check ...)
Once I get the parts in and soldered up, I'll give her a second go and let you know.
What is this project file they speak of? It sounded like Steve had something custom too, is it non standard ?
HA,Ha I am no genius, I can assure you of that.... but thanks anyway.... Not sure about Steve, but I use a custom Movement Panel to drive my create... Basically it is sending 1 line serial commands for forward, left, right, reverse and stop in their respective scripts... Have a look at the custom Movement Panel and you will see what I mean...
Okay, I will take a look ... I'll have to either reboot into Windows or bring up a VM so it may take a bit.
I thought there was mention of a custom file you sent, I'm sorry I was confused. Sounds like Steve also created a custom panel (I'll go look at his in a second too).
You're using a custom one since the default wouldn't work?
So you're basically setting something like Forward(255, 5000) in the movement script attached to your custom panel?
Thought I'd throw in my 2 cents of info here. One additional thing I do is cut the red lead back an inch or two on both ends of a servo cable before making a Roomba cable. Also you can get 7 pin mini din connector on ebay for about $1 each (2 weeks from China).
So once I got a connector that I could take a part and then a handful of cables instead of using an older PS2 wire and tracing I got it to work (so far with the standard panel).
The next thing is adding two servos from Rolli to handle the camera X/Y/Z movement for tracking. I have several CV algos of my own but I want to run through DJ's first and then from there.
I am glad he's got an API / SDK and Python / Node.js support.
So to my new virtual community friends ... thanks for your support!
@RobotDoc, thanks for the reply ... two things though.
Understanding the cable wasn't the issue as much as the pins DJ refers to are for the Roomba connector and not the actual PS/2 connector. I am working on some documentation that shows each and the pins across them. (oh and those are a PITA to solder).
You need to use pin #3 and #7 as the Roomba Identified pins. Although #6 is also grnd and functionally it would work, in the PS/2 cable it does not have as many pins as either the 8 or 7 pin Roomba version and so when you remove the plastic tab inside the male portion, you in essence end up with a space where your pin #6 would be. You can see my earlier comment to see the pins for the PS/2 side.
Thanks for the answer though, it's appreciated.
Sorry, one more thing @Richard R and @Steve S , I was able to use the standard movement pane but for giggles I added a custom one with scripts (as you guys are doing).
I haven't run it yet (it was getting late) but I wanted to run one of the commands by you to make sure I'm on the same page.
sendSerial(d0,19200, 128 130) as an init for the device. sendSerial(do,19200, 137)