cosplaying_bunny
hi all, i have a few upcoming ideas for the revolution (2 new robots to make), but there are a few problems: what are the measurements of the ez-bit connectors, also my google sketchup skills are next to nothing..
but i want to share my designs here~
note that these need to have quite some code to let it move (all the 8 legs, can be even hard with relaive servo)
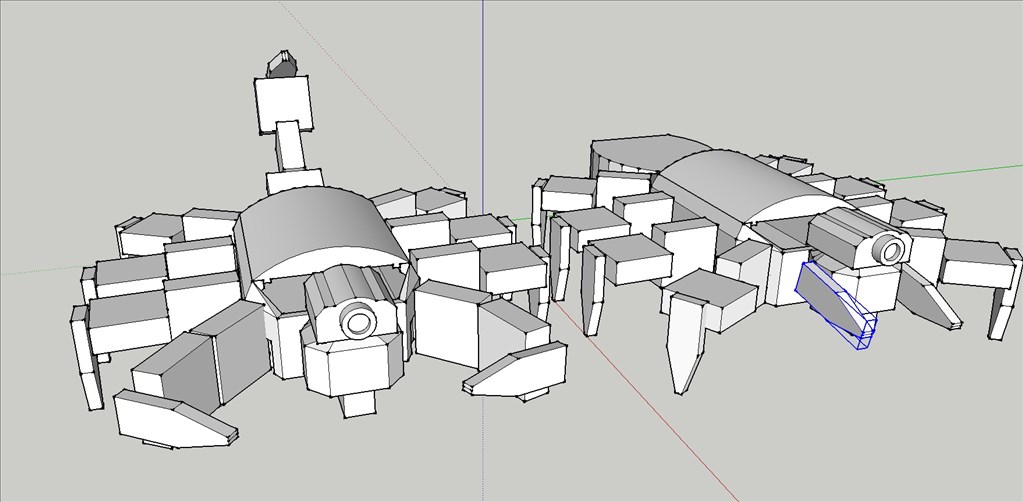
they are both based on a 8-legged body, and 'scorpio' uses all the 20 digital ports in order to function properly (20 servos) while 'spidey' only uses 17 digital ports (17 servos, leaving room for some sensors on one ez-b)
adviceable is to use a servo i2c for both projects and 2-3 lipo battery packs for power (because power consumption), and maybe even a seperate power supply (like a 1083-5 (7,5A 5V) regulator)
screenshot here:
so i hand you all the skp file in the zip, and hopefully someone manages to design it like it should robots.zip
robots.zip

The new ez-b v4 has 24 ports that run on the same voltage as the battery so using a 7.4v battery out of the shop, you can plug all the servos right onto the ez-b, if there heavy duty.
I really like scorpio. Plus because there's 4 unused ports people could expand on this. Try building this in the design control in ARC.
i totally forgot the ezb V4 had more digital ports
also: i can't make this in the design control because of the base for 8 legs isn't in it and i don't know how to export it to a stl file... :c
Don't worry. I don't know either
Clip and play servo-
.Width: 2cm .Length: 6 cm .Height: 5 cm .Weight: 0.066 kg
If you mean the ez-male and female connectors I'm not sure.
Very cool , I'm sure lots of kids out there would love to have a robo Scorpio !
yeah, i mean the clip connectors, i ouldn't find it on this site or anywhere else~
@cosplaybunny , download a couple ezbit servo examples from the library then import them into your 3d designer. You should be able to reference those by measuring them to make sure your clips are exactly the same.
@jstarne1 sketchup 8 can't import them..