
thefrenchleaf
France
Asked
— Edited
Revolution Roli Green Flashing
Hi, I have bought the Revolution Roli. I have followed the instruction to calibrate the servo. And I have continue the instruction https://synthiam.com/Tutorials/Lesson/38?courseId=3 But now the connecting box is green flashing... normally it must be blue flashing.
What happened ? And how I can connect back to the robot (the robot does not appear in the wifi list) ?
Does I have to reboot somehow the box ?
Thanks, Regards, Pierre

Green (Client mode) is good... means your ezb is now part of your network... With green you can connect to your ezb and the internet at the same time.... Blue means WP mode where you can only connect directly to your ezb... that means no internet...
Go to ARC and use the scan tool (the antenna looking icon in the connection control panel) to locate your ezb on your network ...It will chime when it finds it... then select the ip (which will automatically be copied to the connection control panel) and then press connect.... done...
If all else fails, resetting the EZ-B V4 is covered by this lesson
Thanks @Rich, @Richard, the resetting allow me to connect back in WiFi mode to the EZ-B VA module.
BTW, I cannot make the Roli roll... I have follow this tutorial and connect the H bridge (https://synthiam.com/Tutorials/Lesson/44?courseId=3). But when I try to make the roli move by pressing the direction nothing happens.
I have not connected yet the other elements (camera, arms).
Do you have any idea of the problem?
I think Rich can help you with that (He's the H-Bridge guru).... More than likely a mis-wiring of the H-Bridge...
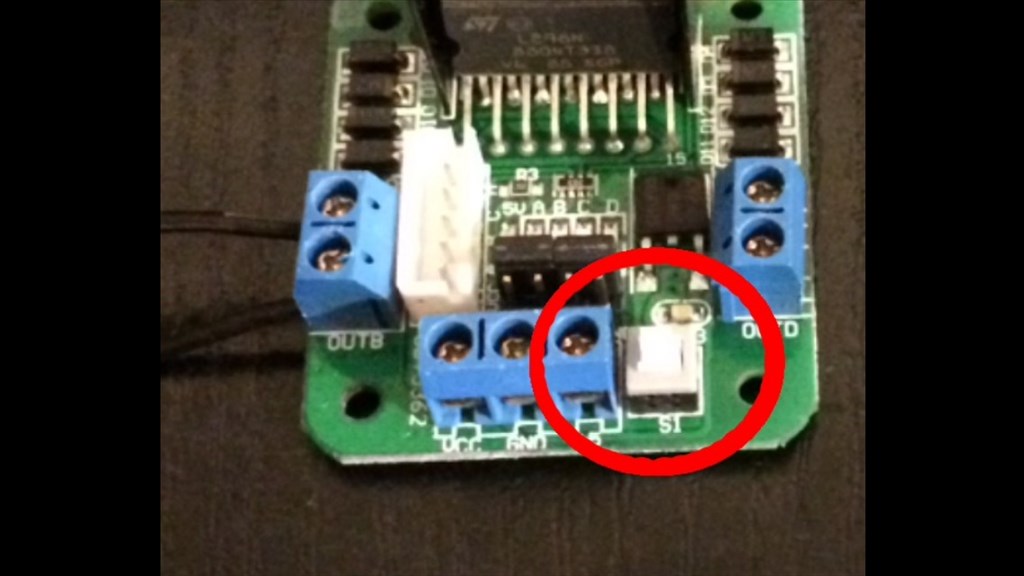
First check the wiring is OK, there have been reports of the wiring being incorrect from the manufacturing facility. Find the H-Bridge and check that the battery is connected to Ground and Vcc not Ground and +5v (not at home so can't search for the photos but I'll look later if that doesn't make sense).
If it's wired OK then it's a case of setting the correct ports to the correct pins which can be done in ARC. The robot should move in some way even if incorrectly configured in ARC however not knowing how it's moving means I can't tell you what needs changing.
This is a bit rushed but I'll revisit it when I get home in about an hour and throw in some more details
One thing that you have to do to make the arrows keys on your keyboard work work, which stumped me for a minute or two, is to click on the box right below the arrows that allow the buttons to work.
I'm not sure if that is what you were asking about but I thought I would throw it out there.
Hi, Thanks @Rich, I have open the robot and saw that the cable where connected on GND and +5, so I moved the red wire to the VCC as explained in the tutorial.
But the robot does'nt move, even with the modification. I have checked many time the connection and I think I have well connected all the wire.
I know that the wifi connection is working since in the diagnostic web panel I can make the robot say different thing.
Do you have some ideas?
I try to make the robot by clicking on the arrow, they become green but nothing happens.
Regards.
Can you make any of the servos move in Roli's arms?