I have been very interested in having my robot look in the direction of a person speaking.
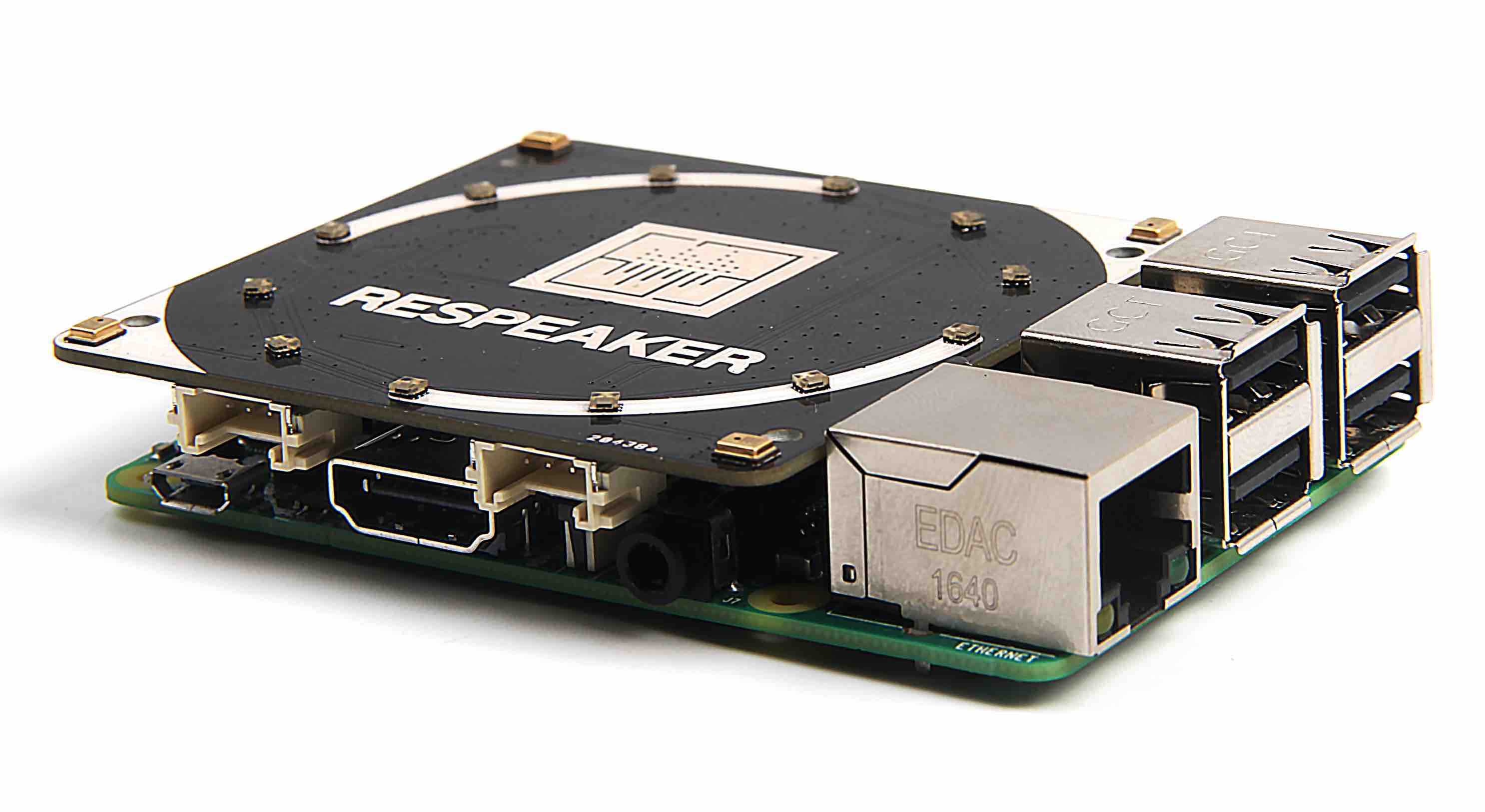
In the above picture you will find a far field Realspeaker mounted on a Raspberry Pi. The system will allow you to output sound location so the robot head can follow the sound of the person speaking. Since Ez-Robot microprocessor can now work with the Raspberry Pi, I thought this would provide state of the art sound location but would require loading all the software to accomplish it. My question is 1. Does anyone know how to explain to a novice how hard would it be to install and edit the required software to make this work and 2. Will this work with Ez-Robot microprocessor. I believe it will. It will cost around $65.00 in equipment.


 Wowwee Rovio
— Movement panel integrating WowWee Rovio with Synthiam ARC for remote drive, live camera, audio and docking control. Under development.
Try it →
Wowwee Rovio
— Movement panel integrating WowWee Rovio with Synthiam ARC for remote drive, live camera, audio and docking control. Under development.
Try it →

Sorry here is the site information. https://wiki.seeedstudio.com/ReSpeaker_4_Mic_Array_for_Raspberry_Pi/ Ellis
Are you sure this will be working...dont you think a camera is the better option? I think its a good idea to have the robot looking to the speakers direction, I would really like this feature...but have you seen any working Implementation?
I think that after getting this work maybe there would be a way of combining video and sound.
@Ellis, Are you using the ARC Designer Pi Beta ? Which Raspberry PI version do you have ?
Raspberry Pi Zero, Raspberry Pi 1 B+, Raspberry Pi 2 B, Raspberry Pi 3 B and Raspberry Pi 3 B+ Are all comparable with the respeaker. I want to use the one in the picture. I think this Pi and respeaker will also bring a lot of capabilities beyond sound location. The link on the respeaker is above.
@Ellis, I read the product page, the target audience is Raspberry PI hardware running the ARC Designer Pi Beta on the Raspberry PI.
Can you share your experience with Raspberry PI and ARC Designer Pi Beta ?
I would love to but I have very little experience with both. I was checking if it would work and if I would be able to do it with the little experience I presently have. I know it seems to be very documented in Sythiam Designer Pi Beta and the Pi software but all the downloading and linking software caused me to have caution.
Just one ting off topic...I had very good experience with Snowboy, with is free to use and works offline! https://snowboy.kitt.ai/