
tom.caine
New Project
Hi, I am a newbie and have been through the tutorials but I'm confused about a function.
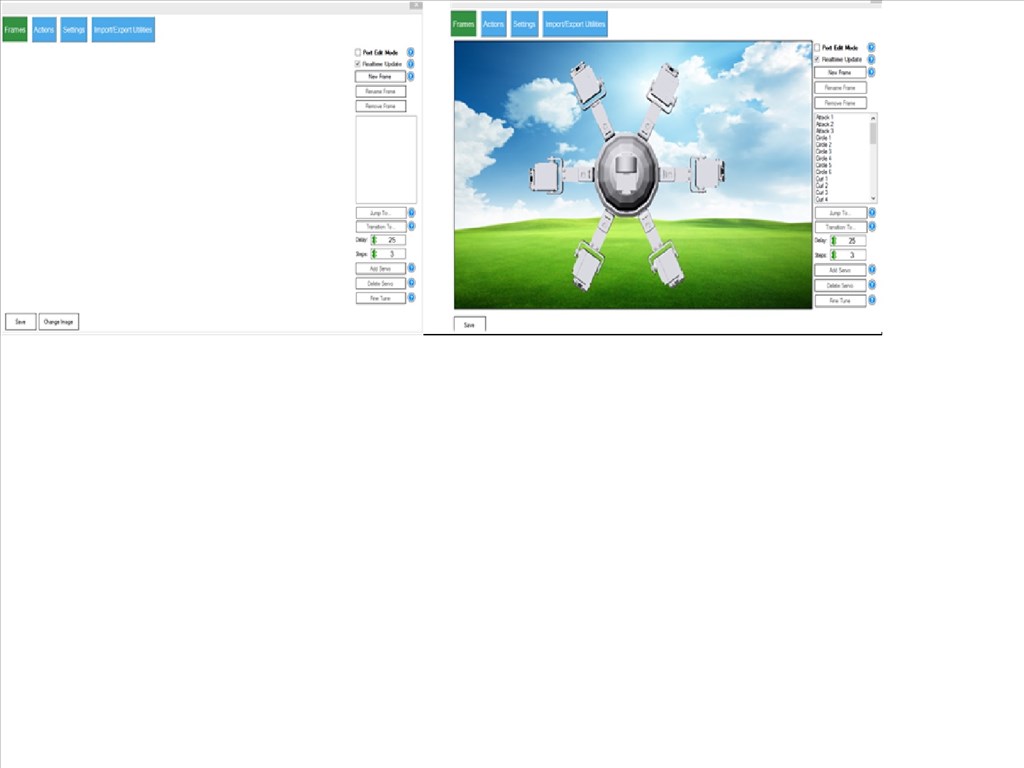
I learned how to add an an action "robot dance" by opening the example Six file, selecting the gear icon on the Auto Position panel and clicking on the New Frame button. An image of Six appears with all of the servos. Here I can adjust their degrees and create frames. I got that. I created several frames and then linked them to an action. The action then appears in the Action window. Works great.
I've been starting with an example file and then doing a "Save As" to create a new file.
My question is - Can I start a new file and choose which robot to create an action for? In other words, how does ARC know which robot I am creating frames/actions for if I simple start a New Project?
When I do start a new project and click on the gear icon in the Auto Position window, there is no robot picture or option to choose one.
I hope that was clear....

Hi,
ARC doesn't actually now which robot you are creating frames/actions for. The background is there just as an aid to show which servo in ARC corresponds to which servo in real life. All ARC knows is that you are moving some servo to some position. The combination of all these servos moving to positions that you specify is what makes your robot move! I hope that made sense
I should have uploaded a picture with the servos.
So the short answer is that there is no template with servos already positioned and the best way to start a new project is to open an existing file and do a Save As?
Tom
I like to start from scratch each project... For instance, using say JD's Example Project for my inMoov would not work well at all... apples and oranges... I add servos to the Auto Position to kind of resemble what my robot looks like (putting the servos in their perspective places), but that's about it... I don't use a picture of my robot in the background...
If you want to start a new project but keep the Auto Position window with all the servos already positioned and the background, then follow these steps:
Ok thanks Richard and James. I will try both suggestions.
Tom