
PJ_Dtechy
Hey Guys, I am a noob at robotics and slowly getting the hang of it. I have this wonderful monster 1/10 R/C truck that I would like to use as a base for my robosapien and also house my netbook, batteries. I already purchase a Dual H Bridge DC Stepper Motor Drive Controller Board Module Arduino L298N, hopefully it arrive sometime today or tomorrow.

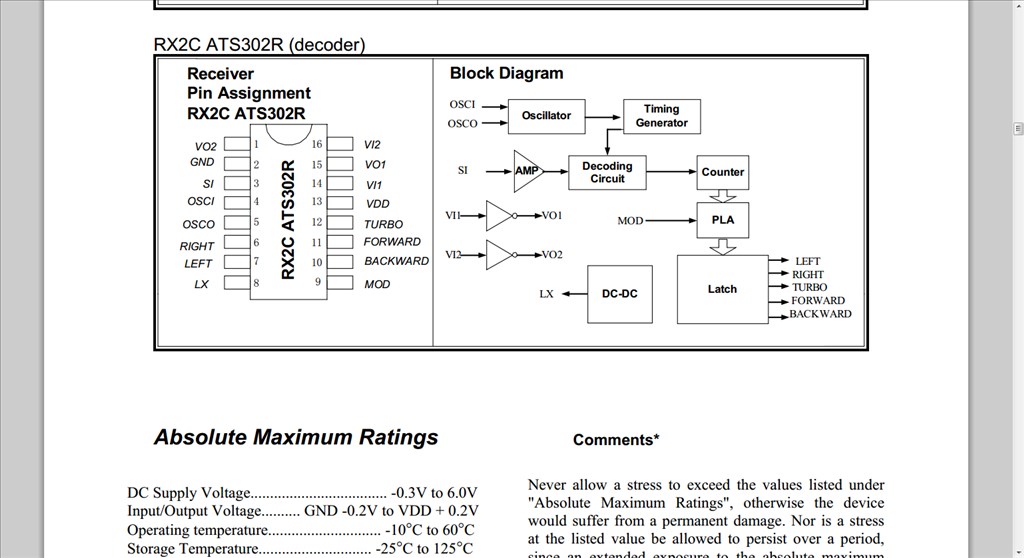
I was able to pull the the controller data sheet online and it is a RX2C controller

Can I modified or solder the the H-bridge Pin directly to the RX2C chip or do I have to remove the board as so

I will b using Technopro diagram as a guide to wire the H-bridge.
I am just uncertain what route to go, and the wiring schematic for the R/C truck seem different than usual on the rear I have blue, red, white & black going to the rear motor case ( not sure about their functions) and I have red, yellow,green, black, brown, going to the front. I think I only need to be concern about the black & red for the front.

It would be interesting if there is a pot under the front plastic cover, I see that there are ~6 cables coming aut of the "blackbox".
If there is a pot you could try to connect the outer pins with gnd and 5v, and the middle pin to one of the analog inputs. Than you have to write a script that software-emulates a servo-electronic with a H-Bridge (two digital outputs) for the steering-motor and the pot. If there is no Pot, you could add one and put a servo-head on it that must be connected to the steering mechanics.
Marc
My apologies but I am a little confuse, what will be the main purpose for doing this ?
If you want to have stepless steering, you need something like this.
A servos is nothing other than a motor mith a gearbox and a pot on the servo head and a electronic that does the job. A servo gets his information from a pwm signal, that tells the servo the postion where it should move to. The pot measures where the servo head is at the moment. Between that there is an electronic that compares the wanted position (pwm) and the current position (pot) of the axis, and tells the motor if he should move and in which direction to reach the wanted position.
Marc
@PJ he's suggesting you use parts from a servo like control board and potentiometer to turn a motor into a big servo. It makes it easier to control from ezb. It looks like you are using a rover kit instead anyways which is easier. The 4wd chassis is cool for running around the yard though. . Any thank you for your support/ spectator ship for theJarvis 2000 project , don't be shy anyone can comment
. Any thank you for your support/ spectator ship for theJarvis 2000 project , don't be shy anyone can comment