
thecrustychicken
My Chair Bot. Have A Few Questions. Help A Chicken Out!
Greetings Everyone...
Had a lot of fun this weekend assembling my chair bot.. Ran into a few issues that I figured I would ask you guys about and see if someone could help me out...
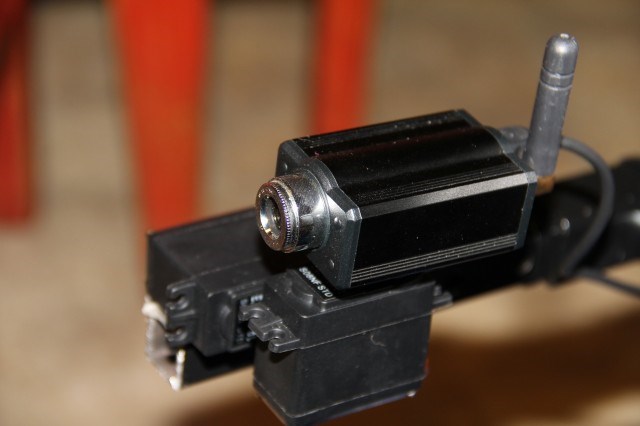
#1 - Look at the photos below and see if there is something wrong with the way I mounted my camera. I didn't know if the orientation of the servos matters. If I turn off servo tracking, and the camera remains stationary, with color tracking on (blue)... I can put my little blue cup on the ground in front of the bot, and the bot will move to the cup.. I have the tracking squares showing up around the cup only... If I turn on the servo tracking, I can't seem to get the camera to follow the cup as I move it around. I tried ticking the reverse servo setting and nothing. I have the left and right servo on the X setting and the up and down on the Y. I have the lower number in the min and the higher number in the max on both axis. Thought it might have something to do with the orientation of how I have the servos mounted.
#2 - I have a qstarz bt-q818xt Bluetooth GPS. After messing around with it a bit, I got it to work. At first I kept getting a error on the debug screen, but I messed with the NEMA sentence format settings and finally got a configuration that works. I see the latitude, longitude and direction information now on the GPS screen inside of ARC. (Yippie).. So the question is, is there any controls that take advantage of the GPS information, or is use of the GPS strictly done inside of scripting only right now? If it is scripting only, is there any script examples that anyone knows of that I can look at to figure out how to get the bot to move to different gps points say in my yard. Figured I could drive the bot to different points, make notes of the Lat and Lon, and script those points as waypoints.
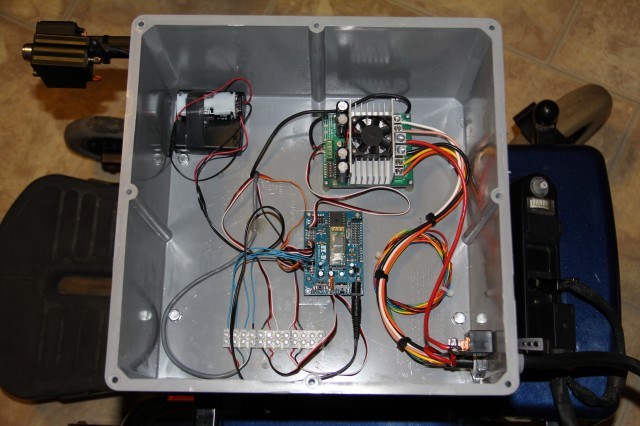
#3 - Eventually, I will install a small motherboard into the bot, but for right now I'm going to order the suggested WIFI module and install that so I don't have to let my laptop ride around on top of the bot through the yard, I think my dogs would trash it out... LOL.. So question #3 is, is there a module that would give me audio output and input remotely through the bot that I can use over a wifi connection without having a computer on-board. It would probably be more cost effective to just install the motherboard.
Thanks for your time and any help! Thanks DJ for a great product, I've had much fun figuring everything out!



So does anyone have any ideas that could help me out with the camera tracking? We are back from vacation and I'm going to tackle it again soon...
Thanks for your time!
I would say that the way you have mounted your camera is fine. I havent tried camera tracking for awhile but I believe you must have it set to low or medium resolution not high. I also dont think having movement tracking on and camera tracking on works either as the robot moves forwards the camera then moves and everything gets confused in my experience. The movement tracking should work fine as I think you are finding just make sure the cursors are set correctly and visible.
GPS is only available via script command GPSSTOP at present but that should be straigthforward to make it hit certain waypoints as long as the accuracy is there
Hope this helps
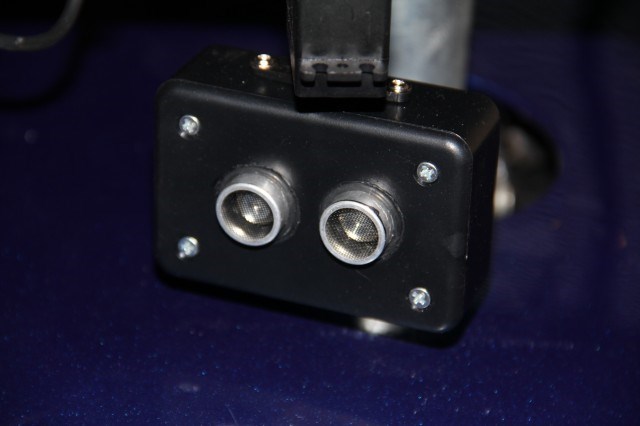
@thecrustychicken. Nice I'm jealous you have such a large robot to work with. I wanted to suggest that you add some additional sensors around your wheelchair base down lower. You could have a couple ultrasonics or IR on each front corner and directly in front. There are additional challenges when you have a robot that is a few feet tall. One of those is that you need sensors close to the height of your wheels because the blind spot of a robot that is very tall is large. Having sensors on your corners and direct front down low might help this guy keep from running into things your radar has missed. Just a suggestion . Have fun with your build!
. Have fun with your build!
Mini Motherboard at a very low cost Intel 2500hn nm express GMA 3600 onboard graphics , just add a WiFi ,bluetooth adapter , 4gb ram, HD and power and you could run this guy all over your yard 64.99 https://www.newegg.com/Product/Product.aspx?Item=N82E16813121705
Thanks for the tips... I'll try to lower the resolution of the camera and see if that helps.