Asked
— Edited
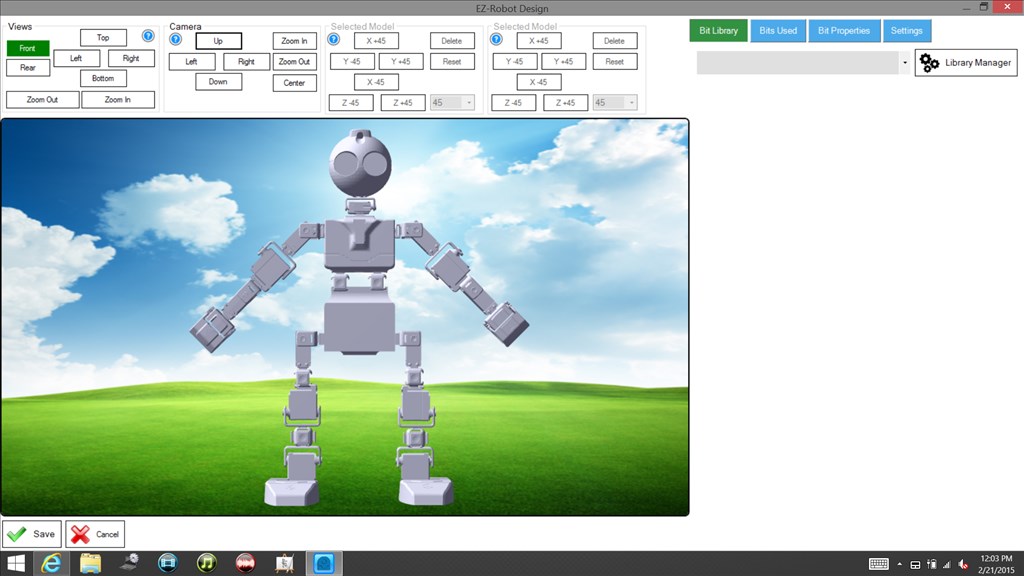
Mega Jd
What do you guys think about making JD bigger? Is there an alternative for the lower body where the hips and legs connect? If we use another body it looks too wide
 Movement Joystick
— Analog joystick UI to control any ARC movement panel via mouse/touch-configurable dead zone, max speed, center-reset for smooth robot motion
Try it →
Movement Joystick
— Analog joystick UI to control any ARC movement panel via mouse/touch-configurable dead zone, max speed, center-reset for smooth robot motion
Try it →

I've been playing around to add to JD myself to give rotating hips however haven't come up with anything that meets my standards yet.
You can use the extension cubes and the blocks under JDs body if you want the torso to be longer and give connections to the sides.
not to sink your boat, but I don't think that thing would be walking any time soon
if you're looking to make JD bigger you're probably going to need higher torque servos in the legs. I think polulu makes some higher torque servos that fit in the EZ-Robot brackets. You would also need to lower its center of gravity, as that thing looks unfit to walk due to its large legs.
@Sudo... Not to thread jack, but just recently (not sure you have heard) DJ mentioned that Jeremie has or is about to finish prototypes on an EZ GPS, EZ gyro, 64 led matrix and possibly a few other electronic bits.... They may take a while to get to the store, but I do like the sound of the gyro....
I think Sudo is right about the leg servos. I too have been tinkering with making JD taller.
<hint, hint, wink, wink> when EZb V.5 comes out JD needs to be 2-3ft tall. :-)
My solution until then was to amputate the legs, extend the arms and attach the torso to a taller wheel driven system.
So if we were to put the JD above on a walking simulation how miserbly would it fail haha
If I get chance I'll do more than simulate it (without the second torso, I don't have a second torso to play with so will have to use extensions)
Initial thoughts: He wont even be able to stand let alone walk.
Cool Rich, let us know what it does or post a video for us to see
Genius! Anthony, that is exactly what I was wanting to do, but you designed it better then I could have!