
Asked
— Edited
Making Init Script
how do i make a script that galapos takes the position when conneting to, ez builder.
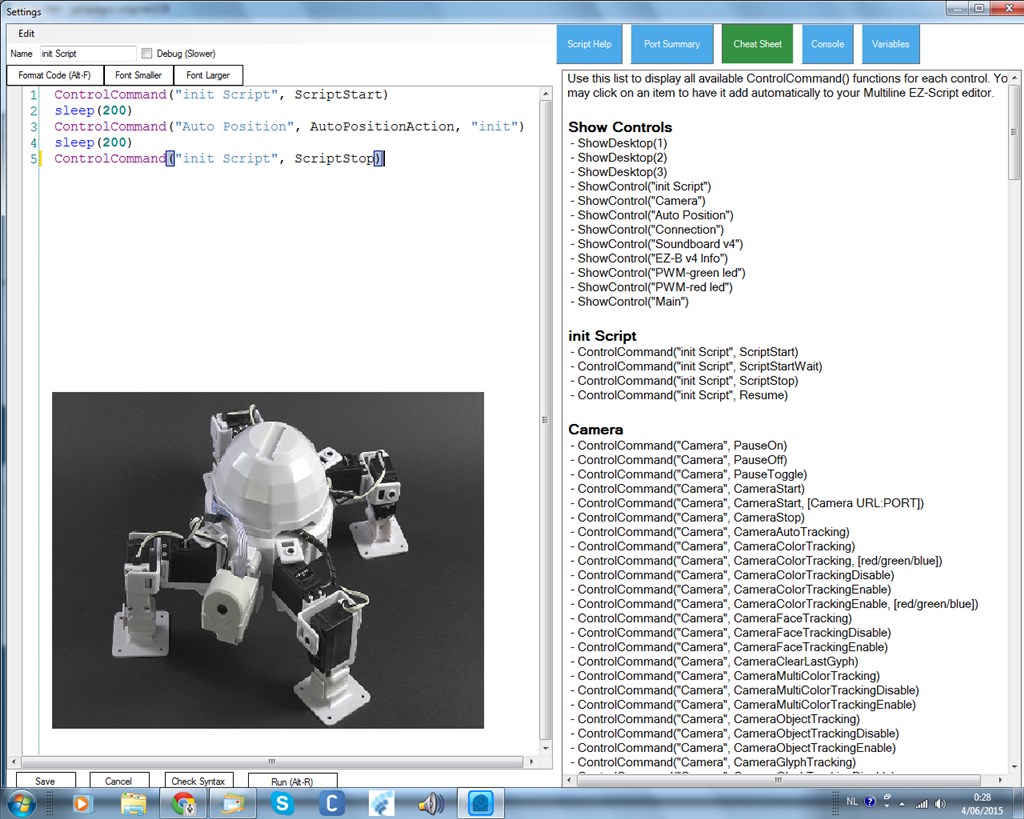
the pic is the original pose .i made the pose and called init.
d0-105 d3-70 d9-105 d12-70
d1-3 d4-177 d10-174 d-6
these settings make the pose like in the pic.

@nomad.
If you have an init script already written (which it looks like you have in your picture), open the configure menu on the "Connection" control, open the script editor for board 0 (if that's what your using), and add the "Cheat Sheet" command for your init script. Save the script then save again on the connection control. Now when your EZ-B connects, it will trigger your init script.
hi steve G
great i found it and it works.one question if i may. wil my script pic above stop in time?
many thanks steve g,i know now how to make an init script.
If it's just going to move to a standing "pose" position, I don't think you need the 4th and 5th lines of script. It also depends on what sped you have the servos set at. If that are set to 9 for example, sleep(200) won't be long enough, where as if the servo speeds of at 1, then it may be ok. You could just set it to sleep(1000) (1 second) and try it and adjust the timing to what you want.
am asking this cause the init text i read still running and below that done. it does only one pose.
Not knowing what your scripts are executing, I'd suggest making your sleeps a bit longer then and see if that helps.
got it thanks