
PRO
jp15sil24
Germany
Asked
, i built an robot arm, the shoulder rotates using 2 servos connected on port D0 and D1 on an iotiny. Both servos are mirrored. it means when D0 rotates CW ,D1 must rotates CCW to have the arm moves in the same direction. I made a test using the skills horizontal servo with advanced mode. D0 is the master D1 is the "slave" and i checked invert. It works fine, both servos rotates in the opposite direction. D0 rotates CW, D1 rotates CCW. I'd like to use auto-position skill. I created an image, i added 2 servos D0 and D1. I can control each servo individually. Is it a way to "link" both servos ? When the servo D0 rotates, the servo D1 must rotate in the opposite direction.
Related Hardware (view all EZB hardware)
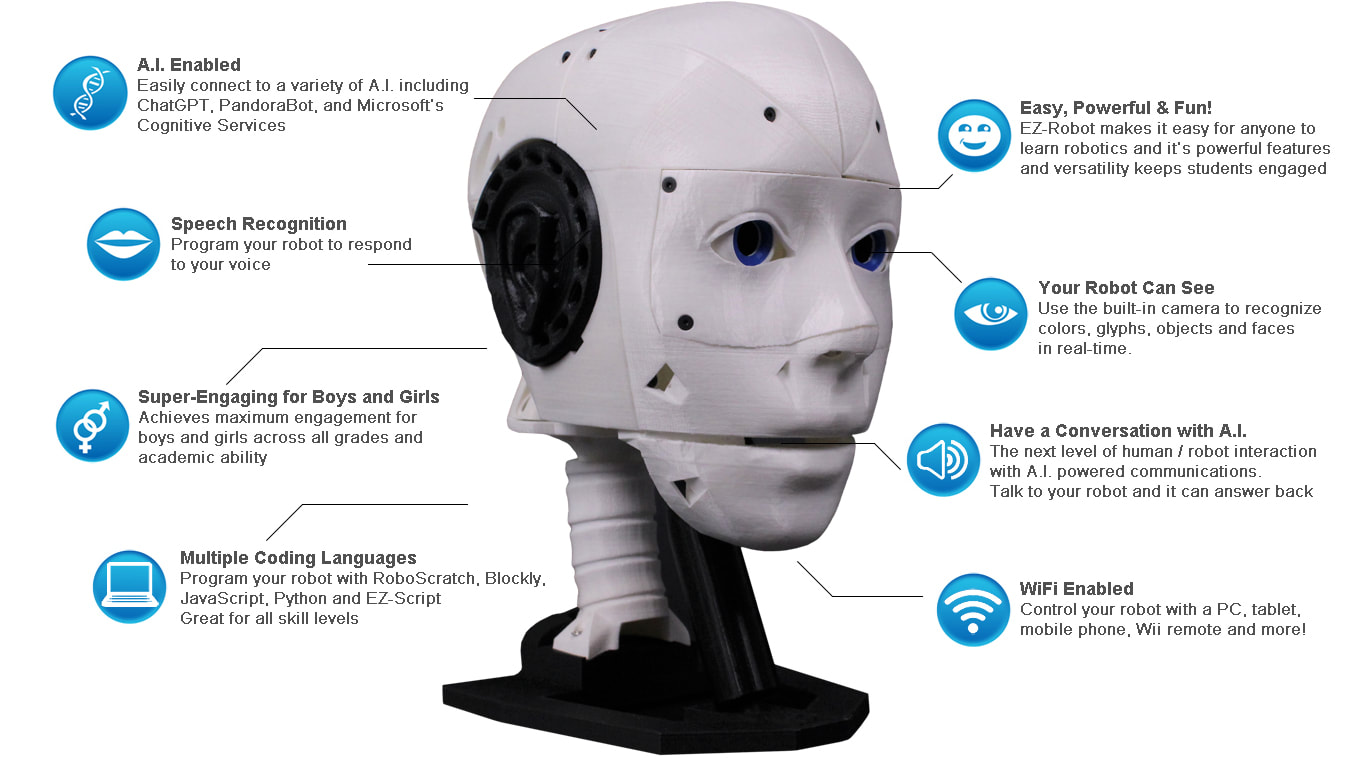
EZ-Inmoov Robot Head
by EZ-Robot & Gael Langevin
EZ-InMoov robot head-DIY educational humanoid kit powered by Synthiam ARC for vision tracking, speech, chatbot integration and mobile control
Wi-Fi
Servos
8
Camera
Audio
UART
✕
I2C
ADC
2
Digital
8
Related Robot Skill (view all robot skills)
Relative Servos
by Synthiam
Synchronize servos by designating a master; slave servos mirror scaled (decimal/negative) positions with min/max limits and pause control

Hi jp15sil24,
You're absolutely correct. When you need to control a large number of servos (like 30), using the global ARC commands is a more scalable approach. You can set the global limits for each servo using commands like:
For each servo, just repeat these commands with the appropriate port (e.g., d1, d2, ..., d29). This way, no matter which skill sends the servo commands, the global limits will be enforced.
Let me know if you need further clarification or additional help with your ARC project!