jstarne1
Jarvis Hacked Omnibot 2000 W Pc ,Ezb & Vacuum Inside By Josh Starnes
Jarvis is a project inspired in part by Jarvis the AI that belongs to Tony Stark in the movie and comic book series IRON MAN. This is my first real robot with no previous experience. I dreamed of making a couple of robots one was a vacuum robot with 4 motors. Brush, impeller, and one motor.driving each wheel. This was back in 98 before roomba was thought of. Lol my drawings as a kid even resembled one. Now that I am older and have tools like EZ Robot I can start making these dreams come true. It has been a learning experience and I hope to learn more. Jarvis is basically my personal computer but also will have a few key features. Goals are that he can help maintain a home by vacuuming and sweeping the floors. My fish need to be taken care of while I am away so scheduled feedings and turning tank lights on in the morning and off at night are in the works. Jarvis can answer calls , act as a telepresence device because he has a camera and screen. He would be great for security by detecting motion, taking pictures or video and sounding.alarm if intruders are detected. Just for fun I would like Jarvis to bring cold beers to the table when asked to which I am sure would be a great conversation piece. Jarvis will be autonomous in some.situations and because of the wireless video link by wifi and wireless keyboard and mouse, I can be checking facebook on either the upstairs or downstairs Tv while Jarvis is roaming the house or cleaning. Thanks to 4g USB antenna Jarvis is not limited to my home and can.take control quest (or kill.switch.lol) from a smart phone or laptop. This makes the Jarvis project.show friendly as I can take.him to show off without lugging around a laptop or other equipment. Also i do plan to somhow work in being able to control his base movements , head ect from a ps3 bluetooth.controller. I'm still thinking of other tasks Jarvis could do but I gotta get this guy together so there is no time to waste!
February 1012 when I first received the Tomy Omnibot 2000 . My starting main parts were/are asus mini itx motherboard, 8 GB ram , Win 7, 250gb Western Digital Hard Drive, Nvidia 560ti graphics card, 2 ghz AMD 25watt tdp dual core CPU, Thermaltake 430 watt psu, 460 watt apc backup, Ez Board Kit w EZ WIRELESS CAM , Shark vx63 cordless vacuum, 4 Power Sonic batteries 12v 9ah , power HD 240 oz servos, hitec 645mg 130oz in servos, hitec 5995tg 400 oz in servos , Robotzone.gearbox 5 to 1 ratio for shoulders and other electronics.
At this time im getting the body ready to start putting things together. The fun begins!



Original head for sure! This is what the Omni 2000 is all about!
Haha the jury has spoken! Original head it is.
They Both look Great, but the Original Head Looks Best.
Mel
Thanks everyone! Hopefully I can get the arms together soon
Jarvis has 2 ezb boards
Anyone want to help me organize where servos and sensors are plugged in? Here is the list of sensors that are a must.
Right arm 4 servos Left arm 4 servos Neck 3 servos
Drive H Bridge sabertooth 12 x 2
Front radar servo
RaDar ultrasonic
Ultrasonic in each hand 2
Mp3 trigger board
Ambient light sensor
Face ultrasonic
2 current sensors
4 contact sensors / switches to detect collision
2 Ir cliff sensors
1 ir distance sensor also on radar turret
Battery voltage sensor
Optional sensors at this time
Close to floor center ultrasonic
Side close to floor ultrasonic x 2
Ir directional sensor
2 directional sound sensors
Ir illuminator trigger on
I think there were other potential sensors but this is the most of them.
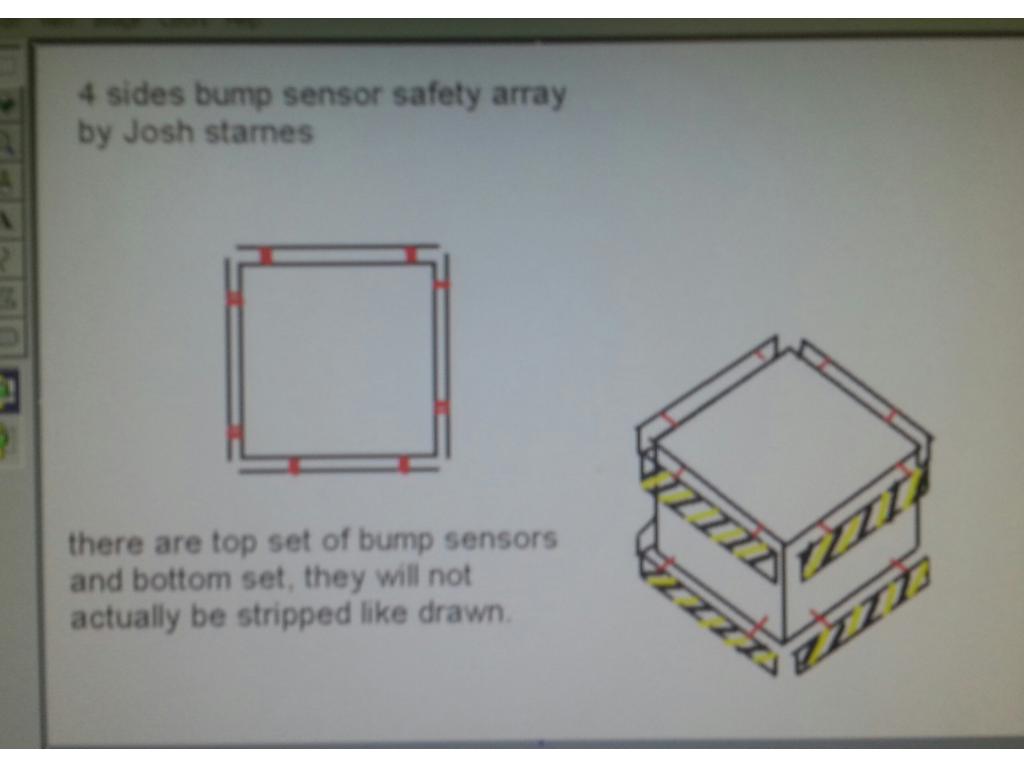
I know my drawing shows four sides but most likely I will only do front and back bumpers. Well see later but 4 sides means four digital ports My idea is utilize two digital ports. All front bumper switches would be wired in parallel ans same goes for sides and rear bumper. The digital port would read zero or off but if a switch is pressed on any given side the robot knows it made contact with a wall or object (like pets or kids feet etc.) The bumpers would be discrete and have 2 or 3 lever type switches per bumper. This is a safety backup incase radar did not catch the object and avoid it so that no one gets hurt especially the robot. I think this is a simple switch system that will work.Ok running at 7 volts I noticed the drive train made much less noise but because I have two motors running each side it still pulls the 45 pounds of weights no problem. I purchased a 10amp step down converter so I have options to tune the voltage the drive motors run at. The unit is smaller than I imagined....
cool