
Paul B
Australia
Asked
How To Stop JD From Moving In Reverse
Hi there, I've just connected a JD robot to my computer and have returned it to all the original setting and calibrations and have found that it still moves in reverse. What I mean by this is that when the robot performs a pre-programmed movement such as the bow, instead of moving it's body forward and it's hands forward the hands and body bend backwards. I've made sure that all of the servos are plugged into the correct ports, in the correct orientation but am still unsure as to what could be the issue. How do I fix this? If anyone can help that would be greatly appreciated.
Thank you
Related Hardware (view all EZB hardware)

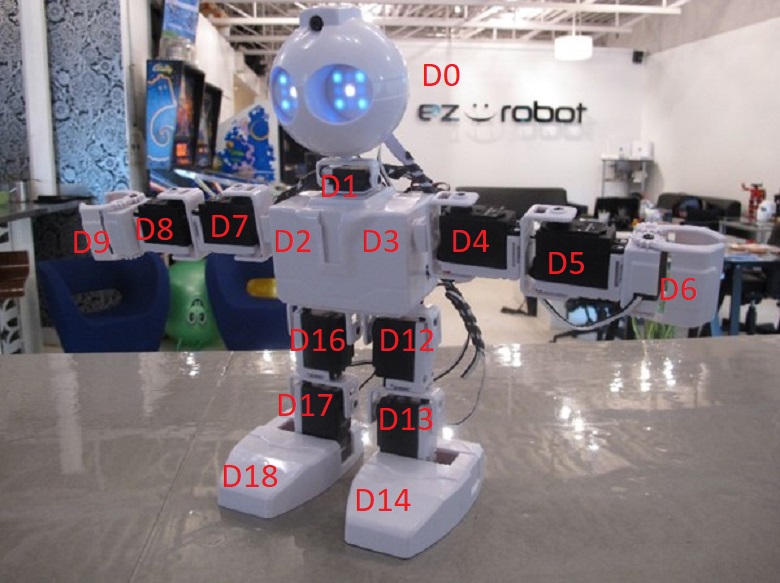
JD Humanoid
by EZ-Robot
JD humanoid robot kit - WiFi-enabled, 16 DOF with metal-gear servos; easy, fun, educational, available from the EZ-Robot online store.
Wi-Fi / USB
Servos
24
Camera
Audio
UART
3
I2C
ADC
8
Digital
24

I would check your physical servo orientation, closely check which way the servo screw is pointing as compared to the picture. Start with all servos at 90 degrees and match it up to the picture in the Auto Position skill. You can also follow the 3D assembly instructions in the default JD project.
I've tried doing these already and it lines up well in the auto position. I also unplugged all of the servos and then reattached them whilst following the 3D assembly instructions. Somehow the robot still doesn't function accordingly.
Ah well the references to "left" and "right" in the instructions can be a bizarre one to interpret
it’s the robots left and the robots right
so it easily sounds like the wires for left are hooked to the right ones and vice versa on the ezb
swap the left and right servo wires on the ezb.
Thank you DJ Sures for the idea, it's not that the robot acts back-to-front in that manner. It's quite hard to explain. Even if the sides are swapped the robot still moves backwards, as in the arms, legs and head bow to direction of the ports when it should bow forwards. Even if the sides were swapped, the head too moves backwards.
The head could simply be put on backward on the servo. That could be an ez-robot manufacturing problem. As we're not ez-robot, we can't really support their hardware. But, the head could require a philips screw driver and swap the head direction around.
As for the arms and legs being backward, the servos are either facing the wrong way or the wires are reversed. If something is backward, flipping it around will reverse it. I was part of the ez-robot JD assembly video, did you watch that video when assembling the robot? EZ-Robot has a lot of information on their website. Here's a link to the assembly video: https://synthiam.com/Community/Tutorials/61?courseId=1
Oh ok, let me check out the head with the screwdriver. Also yes I did watch your videos on assembling JD and have double checked the servo orientation and plug ins. Thank you.
Okay great - let me know how it goes I did chuckle a bit picturing a JD acting totally reverse order haha
I did chuckle a bit picturing a JD acting totally reverse order haha
To use the screwdriver, does that mean switch the orientation of the U bracket and then reverse the way that the servo is placed in? Because otherwise I've unscrewed the screw to switch the orientation of the U bracket but that reverses the position of the head. Haha it definitely is a sight.