jimbo
Malaysia
Asked
— Edited
Hi All,
OK. I have searched the forums and everywhere..But I couldnt find the example of how to connect these 2 item together...
I think its called a 32 servo controller... Where does the wiring connect to and from?
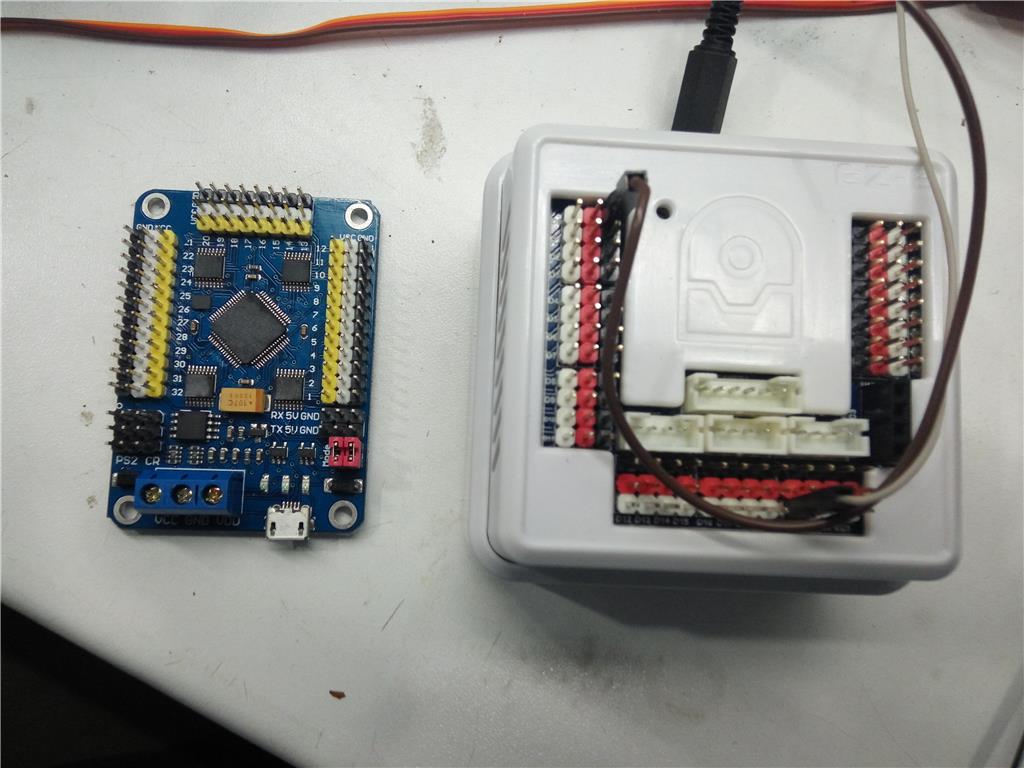
Really sorry if it has already been posted somewhere but I just couln't find it. Thanks in advance

It assumes you have set the SSC-32 for 38,400 baud. It is connected to URAT port 0 with ground and TX on the EZB. On the SSC-32 you connect to ground and Rx.
https://synthiam.com/Community/Tutorials/6/1
https://synthiam.com/Support?id=216
https://synthiam.com/Support?id=216
Note: EZ-Robot is not a manufacturer of this third party hardware device. . Nor is ezrobot responsible for the operation of this third party device. For operational questions, it's best to consult the instruction manual for operational instructions.
Adding this control to your project will connect ARC or an EZ-B v4/2 Wi-Fi Robot Controller to the SSC-32 servo Controller. The Virtual servo Ports, labelled V0, V1, V2... V31 are used to move servos through the SSC-32. The configuration menu on this control will allow you to specify the baud rate and how the SSC-32 is connected.
This control allows servos connected to the SSC-32 to be used in Auto Position, Camera Tracking, WiiMote, Myo, and all controls where servos are used.
Newagetomy,
Thanks but I already read all of the above earlier and didn't find the wiring tutorial...
The wiring connection.
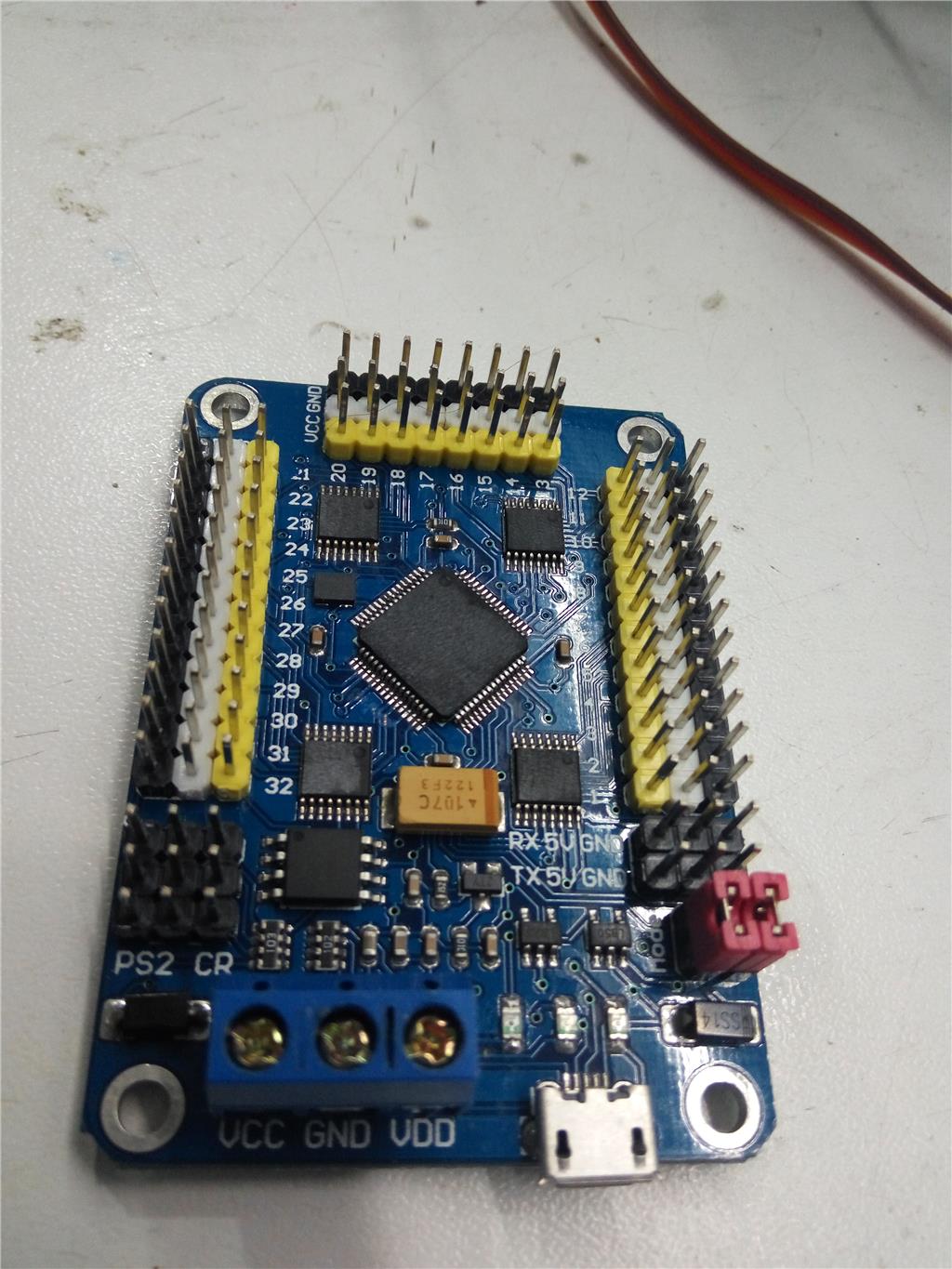
This is not a lynxmotion SSC-32 board... It may function similar but you will need the spec sheet on this board in order to be sure on how to use it properly...
Wiring tutorial?
Pretty sure all the information you need is there, can someone please correct me if im wrong? confused
Richard R said:
I share the same opinion, is not a SSC-32 board@NEWAGETOMY: Do you have one ? Are you sure is a lynxmotion SSC-32 "clone" ?
@Jimbo: What are your expectations ? Do you expect a "Plug&Play" device or are your familiar with EZ-Script ?
@PTP Do i have to have one?
I think its obvious what Jimbo's expectations are?
Read Jimbo's question again-ive cut and paste it for you- "Where does the wiring connect to and from?"
Thats his question leading me to believe he simply wants to power it up, thats his expectation.
Looking at the replies, I am assuming only either a lynxmotion or clone will work with EZB..Is that right?
And I also, PTP, I am sure its a SSC-32 board, except maybe its not lynxmotion.
I am also not expecting plug n play... I am sure I should be able to figure out the script later cos there is a tutorial on it. Just how to connect the SSC-32 board to the EZB. Plug to white connector on EZB? Plug to black connector on EZB? Does require power?
As newagetomy mentioned earlier above, TX and RX and GND... all new to me cos I already fried 1 EZB and 1 EZB camera. Don't want to fry anymore parts...
I am new to this so some help would really be nice
Thanks guys for chipping in on your thoughts so far
@Jimbo Without the spec sheet for that board (unless it is an exact copy of a Lynxmotion SSC-32 including it's firmware) there is only guessing from here on... Logic says this, however: (2 wire connection)
EZB4 signal pin (on any port) or UART TX pin to RX pin of your board EZB4 Ground pin to grn pin on your board...
You will also need to add power to the board separately for the servos.
Without the manual and specs for the communication protocol (again unless it is an identical copy of a Lynxmotion SSC-32) you're probably not going to have much luck with it...