captor03
Help With Servos:
Hello,
I'm building my Omnibot, and trying to get the servos to move less distance than full movement for the arms. (Travel adjust),
I watched the video on how to do it but, when I program it to go into vertical servo, and press configure, the large screen comes up, and the servos settings are 1 in the top box, and 100 in the lower box. Not 1 through 36 as in the video. Also I can't find the dial screen that comes up to manually make the servo's move. Am I in the wrong program?
I have the latest version updated in my computer. Any help is appreciated.
By the way if your reading this DJ, I took apart the Omnibots hand, and put a micro servo in it. On the servo arm I put a ball link for less stress, then a rod that goes to one side of the hand so it will open, and close it. Real cool!
Thanks, Den

The GUI changed, there is no dial or slider but click and hold in the box with the servo position in it, move the mouse and watch the servo
Max and Min 1 and 100 work the same way in config I believe.
Do you have photos of your omni hand? The open close is next on my list and I haven't found a suitable way yet.
Right click on the servo position for a drop down list of positions also (I only found that the other day!)
As soon as I get home I'll see if I can upload a picture of the hand! Thanks for the advice. I'll let you know how I made out.
Den
Hello,
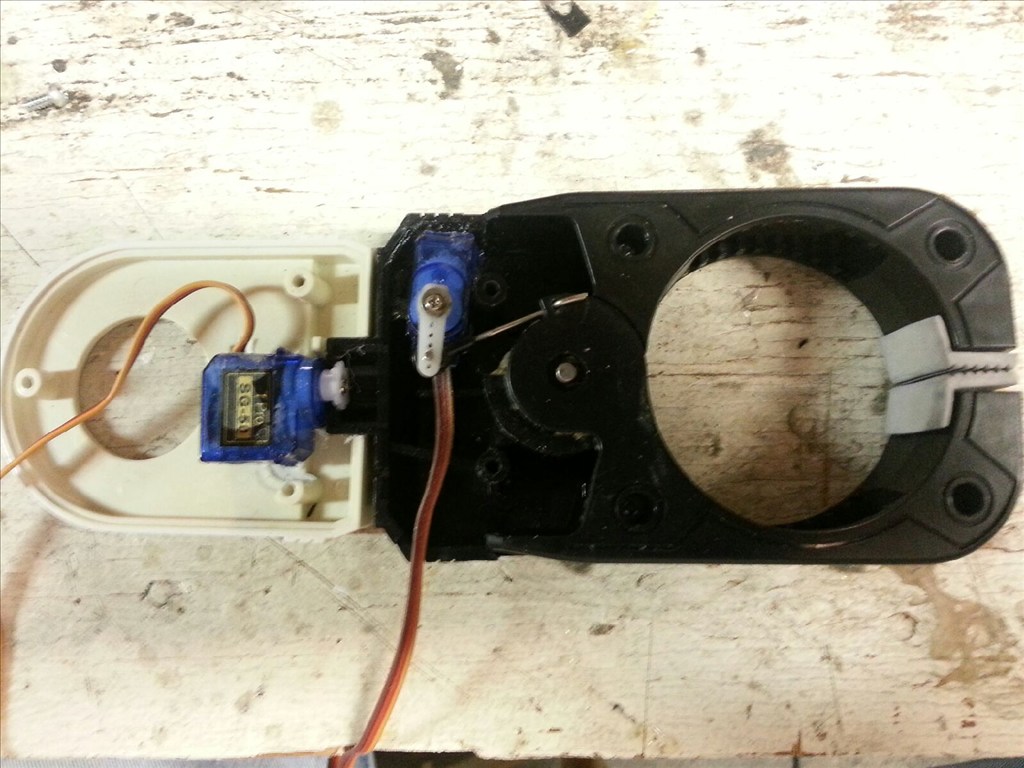
Here is a picture of the hand. Hopefully it will come through. I've been doing RC planes, and helis for 20 years so I'm not a stranger to servos, and making things work!
The servo in the hand is a micro servo. Its hot glued in, and there is a ball link on the bottom of the servo arm that is attached to the control rod. I then drilled a hole in the plastic of one side of the hand, put a Z bend in the rod, and attached the Z bend through the hole. On the plastic piece that covers the servo, I had to shave the plastic so it won't hit the top of the servo arm when I screw it back together.
I cut the plastic in the "wrist" I'll say, and glued a mini servo to make the wrist move. I did this a couple of times because I realized I had to move the servo back to hold the hand in. The more space between the hand, and the wrist, the more the hand will lean. I could have used a ball bearing to support it, but since I pulled the hand in by repositioning the servo back seemed to work well. As you can tell I cut the end of the hand that goes into the wrist so the servo arm will fit inside it. I cut the 4 sided servo arm, and hot glued the entire half of what you see in the picture. The reason I used a 4 sided servo arm is because the glue will have more to bind to. First I placed a piece of tape across the opposite end where the servo horn is so the hot glue won't pour out where the mini servo sits. Hopefully I'm making sense! Just be careful not to let glue attach to the servo arm, and the servo. This will prevent the servo from working. I let it sit for some time. Later I put glue inside the plastic cover that goes over the micro servo, then placed it back where it belongs, and put the two screws back in.
I hope this helps!
Den
Thanks everyone it worked. Another question!
I am using analog servos. In the configuration when I assign a port I don't see the A0-A7 analog ports. Instead I see V ports. I tried using them figuring they may be the A ports on the EZ board, but they won't operate the servos. I don't want to use the digital ports because I don't want to burn the analog servos out.
Some advice please?
Den
By the way I just used the servo in the hand, and it works well. The only problem is the servo only has enough power to open it about an inch or a little less. I don't know if this is because the servo is weak from being a micro servo, or because I decided not to take the spring out of the hand. Maybe both. Food for thought.