elfege
USA
Asked
— Edited
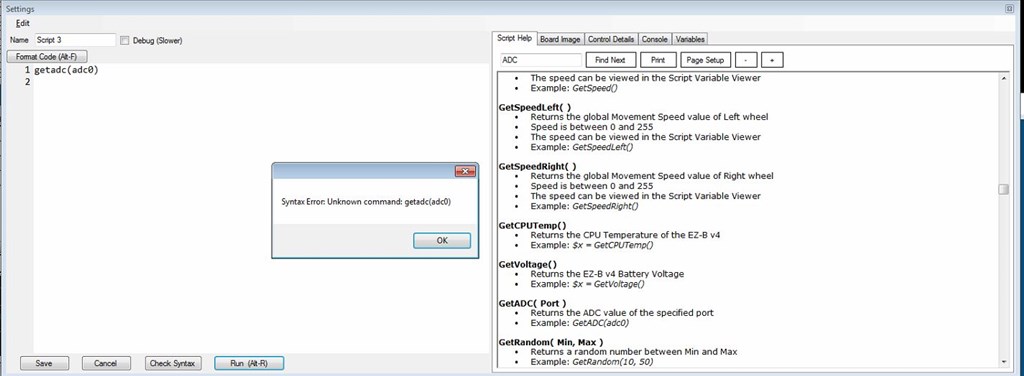
Getadc(Adcx) Does Not Work
What is wrong ? Anyone ? I'm stuck...
 Watson Text To Speech
— Human-like audio via IBM Watson Text-to-Speech: multi-language, selectable voices for accessibility and automated interactions. IBM Cloud required.
Try it →
Watson Text To Speech
— Human-like audio via IBM Watson Text-to-Speech: multi-language, selectable voices for accessibility and automated interactions. IBM Cloud required.
Try it →

Assign it to a variable.
$adcvalue = GetADC(ADC0)
Or use as part of an expression
Print(GetADC(ADC0))
IF(GetADC(ADC0) < 10) Print("less than 10") Else Print("more than 10") EndIf
running just the get command is pointless as it can't do anything with it. It's like walking up to someone and saying "43".
Hello Rich! Long time no see! How are you doing? Thank you! Basically I wanted to get a voltage value on my phone through telnet, but I get it now. I'm (re)discovering telnet.
Here are some news of your most humble disciple's projects : I can now boot up my robot and turn on all its relays with one simple macro, so I can also easily put it in a standby mode for a more efficient charging. Last summer I was given the opportunity to test my two robots while I was traveling in France and I needed only one physical intervention to reboot one of them, over 5 weeks of absence, and this was due to an unavoidable safety cut-off circuit that I implemented on my batteries to prevent any risk of fire or over discharge, so in a way it was not even a failure but a simple safety protocol that worked as expected. Now I successfully added a redundant system that allows the robot to switch to a second controller whenever I lose connection so I can still bring it back to its charging station, providing I don't forget to bring it back to its docking station as it happened last summer...
: I can now boot up my robot and turn on all its relays with one simple macro, so I can also easily put it in a standby mode for a more efficient charging. Last summer I was given the opportunity to test my two robots while I was traveling in France and I needed only one physical intervention to reboot one of them, over 5 weeks of absence, and this was due to an unavoidable safety cut-off circuit that I implemented on my batteries to prevent any risk of fire or over discharge, so in a way it was not even a failure but a simple safety protocol that worked as expected. Now I successfully added a redundant system that allows the robot to switch to a second controller whenever I lose connection so I can still bring it back to its charging station, providing I don't forget to bring it back to its docking station as it happened last summer...
Thanks again and have a nice day. Elfege
Cool. This topic may be of some use and give you some ideas
Don't forget to mark as solved if your question has been
Sure! Thanks again.