
Ez-Quadcopter, What Hardware?
Hi Guys, (Note: the following is quite summed up cause I had a long message typed out explaining in detail, but I unfortunately hit a wrong button and deleted it...)
I want to build a quadcopter powered by an ez-b. But, from previous questions, I know I need more. So, I need your help. What Hardware do I need?
1.Flight control board: must be able to fly the quad when ez-b is absent
2.Motors: The motors must have high torque(lots of power for lifting), but also be conservative of battery power, for long flight times.
3.Esc's: Must be compatible with the flight control board
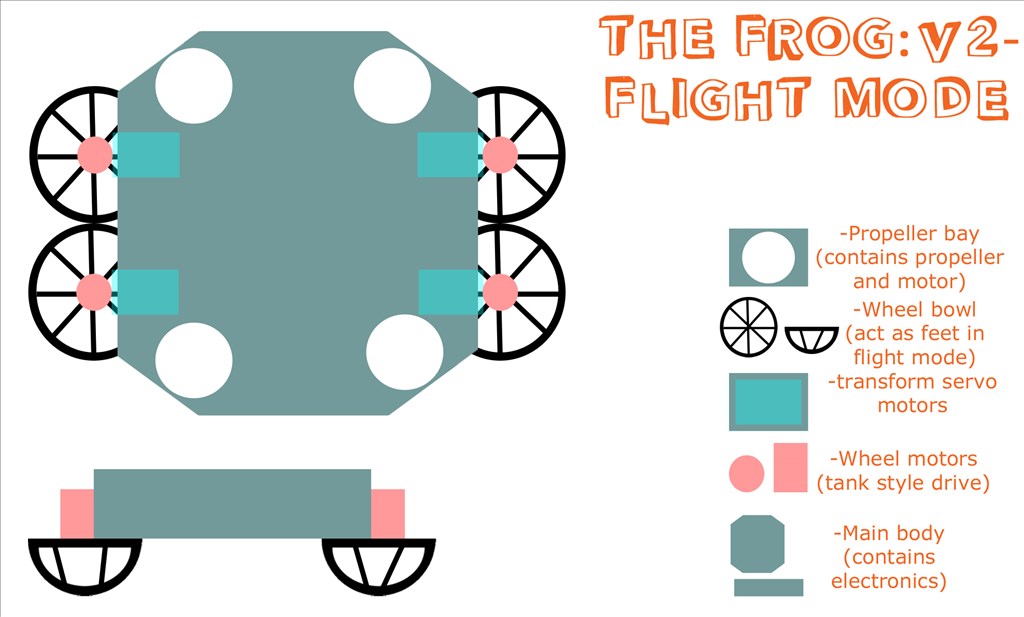
- Propellers: I am looking for ideas on a 4 bladed propeller that works well, as I want to make the quad a shape shifter and turn into a car. So the blades will act as spokes.
Some notes: Max quad weight is 10 pounds(the very max) with a payload of (max) 75% of its own weight. I will post designs of what I'm thinking of later.
As for anyone who helps, you name will be put on the quad as a thank you.
Appreciate the help anyone gives me.
If someone could list there own setups, that will help too.
Thanks, Tech

I can put together a list of everything needed , basically if you get a "arduino capable" flight controller and gyroscope board then the ezb can throw it commands and of course use the V4 integrated camera as well.
Ps. My friends call me Scroaty McBoogerballs, that would be a great quad copter name
Scroaty McBoogerballs? Hmmm, they don't sound like your friends at all...
Agreed. On Richards comment. Don't think I would name a quad copter Boogerballs, unless of course it was Halloween.
Great Josh! Thanks a bunch! I tried the multiwii a while ago but couldn't figure out the communication, remember? That was an arduino compatible too, but alas it was too difficult to figure out. I didn't buy it of course. P.S. You might need to look up the definition of "friends" in the dictionary.
Here's a breif diagram of the concept(in drive mode).
Here's the frog. How I do this in the code, I don't know. Just an idea for now.
Scrotie McBoogerballs...
isn't that from south park? that would be the perfect name
But here's the problem with that one Anthony. It doesn't "transform" as some people state. To transform something would have to change. Also, if a kid gets control, even though it says they're safe, those blades are more likely toast. My design can take the brunt of that, or will. Further more, it can't lift anything. And, most important, It isn't customizable! This you could add arms! And any other ARC/ez-robot component to be exact.
(Note: This may have sounded harsh. I meant it to be informative, not attacking.)
@anthony
the omnibot has been done, but you're making your own, aren't you? How is techno's project any different?
also @Technopro you may want to disconnect the tire from the propeller, I'm not exactly sure it would be best to put a load on a light and thin plastic propeller. Then again, I've never really made a transforming quadcopter so I would never know
@Sudo, I was planning to make the propeller blades thicker and stronger to withstand that force. How? Well, I'm not sure yet.
If I find that it will be more trouble, I might go for a pot design. (NOTE: Yes there are some kinks with the drawn design.)