
robtbldr
USA
Asked
— Edited
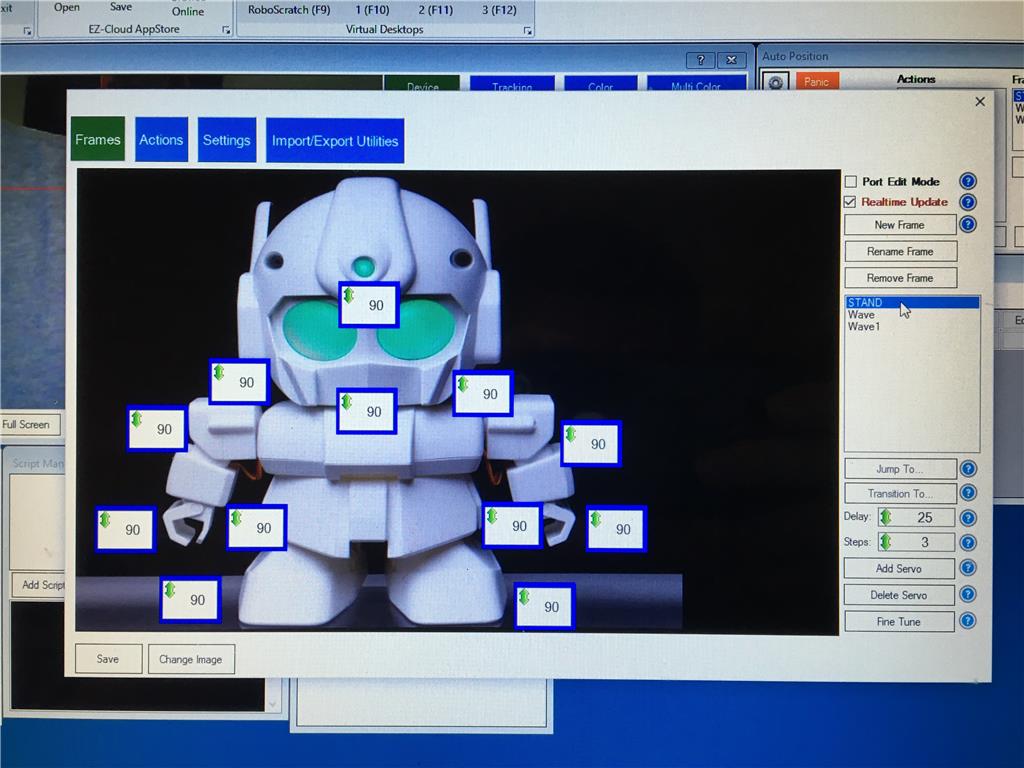
Extra Motions In Auto Positioner
When I create a frame in auto positioner, sometimes it goes haywire and moves uncontrollably. I have tried starting over a few times with new profiles to no avail. All the servos have been fine tuned, and can happen in any frame. Any ideas why?

This is what happens as I go from frame to frame in auto positioner. I use a fresh lipo and the servos are on a separate power supply at 5v. Any help is appreciated.
howmany volts are these servo's ?
you can try with one movement excample head turn left or right, and set the delay higher some75 also i dont see the calibration pose.arms side ways
The voltage at the servos is 5v but the ezb gets a 2s battery. I can move each servo in a frame without glitching but when I move from frame to frame I get wild movements.
two batts ? did you try with one batt ?
I have a single battery 2s and a bec to the servos supply 5v. It can supply 8a to the 12 servos. It should not be a power problem as all the servos are moving and not a lack of power.
maybe too much power.also when connecting the robot to ARC, does it have an init ?
7.2v 1000mah battery and a 5v is below the 6v used for most servos. I am only moving frame to frame. No animations yet. When I do an animation sequence, it goes insane. As for individual frames, it is random.
do you have init when connecting the robot ? all servo set to normal 90 degree,so when he connect he chould stand with his , arms side ways.if you dont have a init page ,the robot has no starting point.