dReadSolJah
EZ Robot JD Servo/Control Problem
Hi!
Unfortunately, I have a strange problem with my EZ Robot JD.... my right arm Servos are having a strange behaviour!
I try to explain:
When i do the servo calibration, and start with the right Hand, when i go from 0 to -100, it opens the hand normally as it should. When i go from 0 to +100, it moves the second servo for the ellbow for 90 degrees! When i go on to the ellbow servo, thats connected to the hand, and go from 0 to -100, it again opens the hand! When i go from 0 to +100, it again moves the ellbow to 90 degrees! On both situations, it goes -90 Degress (pointing to the back of JD).
Initially, i thought that there might be something wrong with the servo connection cables, but everything seems to be fine there. I also rebuild JD, and re-did the servo calibration, tried different devices (my PC, 2 of my laptops, my iPad Air, its always the same..)
So there must be something wrong, but i cannot figure out what
Please, do you have any idea, what could possible be wrong? This is my second controller board, because the first one just stopped working suddenly, so i needed a new one (the reseller supplied this for free, thx!)
Thank you very much for your time and help!
Maybe i can send you a video, if you need to see what i do, and what JD does?
Cheers! Thomas
Related Hardware (view all EZB hardware)


Unfortunately, we don't offer support for EZ-Robot products at Synthiam. You would have to contact EZ-Robot directly.
It sounds to me like the EZ-B v4 may have two pins that are shorted together if two servos are being controlled by one digital port. Otherwise, you could have "relative servo" turned on in the ARC software in which case you can have two servos controlled by one digital port with the software.
Jeremie, thank you for your answer. My workaround is to use other free pins for that 2 servos and re-configure them in the designer or the port-mappings. Bad thing is, i need to rebuild all old project files based on the old Servo-Pin-Setup.... or is there an easy option to rewrite all config-files to point to another servo? Because all Action Frames are wrong now.... massive amount of work
Seems like the 2 pins are really shorted somehow?!
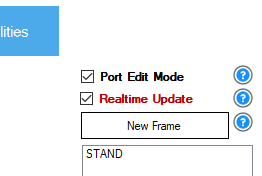
Yep, it’s really quite easy. Enable port edit mode and change the ports to what you need them to be and it will change them for all the frames.
Great, thanks alot!!
I can mark this as solved now i think Its still broken on this ports, but there is a workaround, seen above. Maybe i will still try to reach out to EZ Customer Support to see what they say.
Its still broken on this ports, but there is a workaround, seen above. Maybe i will still try to reach out to EZ Customer Support to see what they say.
@Jeremie.
How do we find this mode and enable it?@Dave Schulpius
The checkbox is found in the upper right-hand corner of the AutoPosition Skill
Complimenting jeremie’s replies, the Auto Position manual will be useful: https://synthiam.com/Support/Skills/Movement-Panels/Auto-Positioner-Gait?id=16057