
Dynamixel Settings Question
This question is directed to anyone running dynamixels. I am wondering if any of you have attempted or found a way to override the thermal cut off. I've looked thru the Dynamixel wizard and the documentation is lacking to say the least. In a perfect world the ability to turn off these safeties would be ideal.
I'm trying to either override the thermal, default is 70 deg c temp can be set (0-99 deg c) and turn it off OR override that torque goes to 0 when temperature reaches over the thermal cut off.
The Alans I have on the other side of the world are thermal shutting down do to a hot environment. We are going to be working to cool the area but it would be better to override the protections (I'm sure voiding the warranty) or the ability to change the settings in software.
The Dynamixel Wizard will allow you to set thermal cut off anywhere from 0-99 deg c and change the torque settings but I do not have access directly to Alan and would be better to have a software solution. Right now Alans have to be turned off and the motors to cool down for 20-30 min to reset the thermal and bring them back online.
An example of a fix would be adding two buttons to the EZ Robot Dynamixel plug in so one could change the thermal settings and or change the torque setting if thermal limit is reached. I assume those could be added as we can turn on and off the leds, rename Ids and change baud rates within the plug in.
Any help would be appreciated.
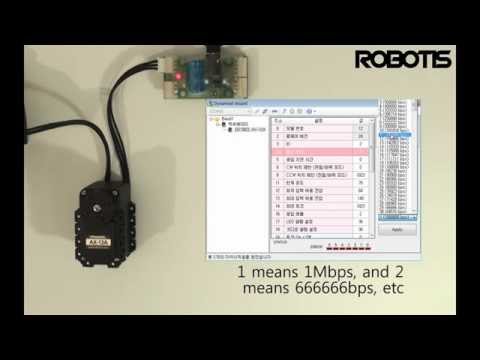
you can see the settings for the thermal shut down at 5:05 on this video.

I can take a look at disabling the thermal shutdown in the plugin. It’ll take a few days because I’m traveling
Understood and thank you. That would probably do it or disabling the torque falling to 0 if thermal reaches limit.
Thank you again.
I don't know what "disabling torque falling to 0 if thermal reaches limit" means. You can always contact the manufacturer of the servos and use their configuration software. EZRobot can move the servos, but the options to configure and such are specific to their software.
Perhaps it's best to have a cooling fan installed on the back of the plastic surrounding or what ever is covering the servos. Give the container some heat flow - rather than disabling an important safety feature.
I don't think it's a good idea for ezrobot to support disabling the temperature limit on the dynamixel servos. According to the Dynamixel manual, it's discouraged, and I'm guessing that's to prevent fire.
Manual: https://support.robotis.com/en/product/actuator/dynamixel/ax_series/dxl_ax_actuator.htm
Screenshot:
"disabling torque falling to 0 if thermal reaches limit"
The way it works to protect the motor is to automatically move to torque to zero ie the motor will not move if motor reaches above 70c for me that’s only 152 deg F.
There is an option to change the temp to 0-99deg C, in the Dynamixel wizard. That’s their built in limits.
Do you feel comfortable with adding access in Dynamixel plug in to this control. So user can change this variable (0-99)?
Check your email for additional info.
@dj we can stand down from this. It was a software glitch, not the Dynamixels, not from overheating.
Thanks for your time !
Fxrtst, are using the ezb4 controller to control the dynamixel servos?