
Dana W
USA
Asked
— Edited
Continuous Servo Direction
I have a modified servo that is only spinning in one direction. Example, click forward, it rotates clockwise at one speed, then reverse, spins clockwise at a slower speed., Ive tried both a modified servo, and MS movement panel, as well as different ports, and releasing. Any thought?

Most continous rotation servos have an adjustment screw. Does yours?
yes, and i adjusted it to slow it down a bit a few days ago. Maybe the cause? It's been working ok, but maybe vibration? I had it running around the house on a rover
K just set them back, and all ok Thanks DJ
Thanks DJ
To slow down the servo, change the settings in the movement panel. The values used to move the servo can be decreased or increased - depending on the direction speed you are changing.
The adjustment screw is not for changing the speed. The adjustment screw is for adjusting the nuteral (stop) position.
To adjust the speed, change the settings in the movement panel.
ACK! I did that because of a post i saw a few days ago when i was having a problem with the movement panel. One of the guys mentioned using the screw to slow them down. Lets say i wanted half the speed that they are set OEM, how would i set them? No matter what i try, i can get it, i get random results
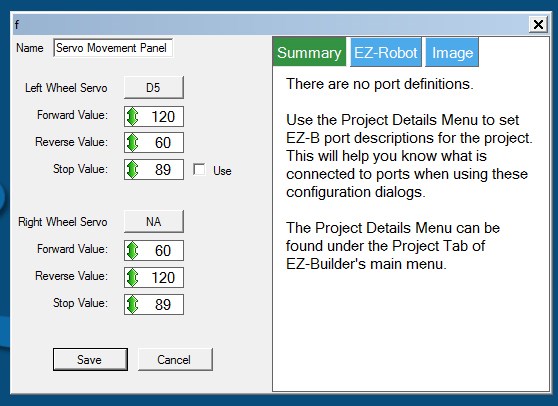
LW Forward Ive tried setting to 120 and LW Reverse to 60. RW Forward Ive tried setting to 120 and RW Reverse to 60. Ive tried reversing the values, ive tried matching them. Pretty much every combo you can imagine, but nothing consistent.
I noticed that you have no ports selected for your Modified servo Panel - meaning, you have no servos specified so it will not work. As for selecting the ports for the servos, follow these instructions..
locate free ports on your EZ-B
connect the plugs from the servo to the two free ports of your ez-b. One for the left, and one for the right servo. Take notice to the polarity of the plugs. The GND is the black pins. Power is the RED pins.
make note of what ports you connected them too
visit the configuration dialog for Modified servo Movement Panel, such as you have screen shotted
Click on the ports (currently where they say NA) and select the ports for your modified servos that you have connected to in step #2
*Note: when you press the button to select a port, a dialog will show you a picture of the ez-b. For more information, you can visit the LEARN section
I use these values for the Rider robot - which you can find in the EZ-Cloud AppStore...