RedDragonManor
Concerning Pandorabot
Hello everyone I got another question and I have to say for a first timer in doing something with writing codes like this. I think I'm doing pretty good, but I have a question. I'm a little stumped and want to make sure. I'm putting the right codes codes were their suppose to go. I know that's what their there for and to use and you can edit them, but since I wanted to build her brain fro m the ground up. I did as the tutorial said to do. I just want to make sure I'm doing right. I know I have the first code right.. I'm wanting to have movement from her as she speaks and to give that realistic feel. Talking about the first Category. when I first did the a AIML code for a greeting for the pandorabot,but I also wanted to make it to where her head and stuff would move when she speaks at the same time. So the way I understood it,was to edit the AIML I had first created and added the second category and then republish the AIML code which I havent done yet want to make sure it right first. The part I'm a little cunfused is where to put the servo code information the information on 1 and 2 on step 7 for combining speech and movement. it wants me to add the servo script in the script editor, but it doesn't say which one because it wants me to save and name it then go back in and find the certain ControlCommand to add to it but it doesn't say which script editor in the ez robot builder to use can someone help me out with this step. Thanks Paul. I think I have the servos done right for the first part those are for her head her mouth will be driven by the audio coming from her speaker
<?xml version="1.0" encoding="UTF-8"?> <aiml version="1.0">
<Catogory> <Pattern>HELLO</Pattern> <Template>Hello! its very nice to meet you.</Template> </Catogory>
<category> <pattern>HELLO</patteren> <template>[ControlCommand ("Head Movement for greeting with Speech", Scriptstart) ]</template> </category>
</aiml>
*code for ez robot builder script editor
Say("Hello! its very nice to meet you.") Servo(D0,1) servospeed(D0,2) Sleep(1000) servo(D0,90)
Servo(D1,1) servospeed(D0,2) Sleep(1000) servo(D1,90)
Servo(D2,1) servospeed(D0,2) Sleep(1000) servo(D2,90)

had to go back and re edit the post it didn't post right
@reddragonmanor, I believe you would put the movement commands in the same script that you have typed in the category under template ControlCommand ("Head Movement for greeting with Speech", Scriptstart)
You also might want to put a sleep command maybe 20 to 50 if needed in between your code if needed.
But without seeing the code in your Head "Movement for greeting with Speech", Scriptstart) i'm only guessing here.
Hey Merne The first code that i posted thats for the pandorbots AIML file for my robot but Im suppose to put this code in using the script editor in ezb builder but it didnt say what script editor to use in ezb builder
Say("Hello! its very nice to meet you.") Servo(D0,1) servospeed(D0,2) Sleep(1000) servo(D0,90)
Servo(D1,1) servospeed(D0,2) Sleep(1000) servo(D1,90)
Servo(D2,1) servospeed(D0,2) Sleep(1000) servo(D2,90)
then I'm suppose to save it with a file name then reopen the script editor and use the Cheat Sheet to add the ControlCommand part I need with this Part here is a link to the steps https://synthiam.com/Community/Tutorials/156/6
Ok now i belive i understand. In ezb open a new script, use script manager which you can have multiple scripts in one location or a single script that's up to you. Name The script the same as you have in AIML, eg, "Head Movement for greeting with Speech" Then put your code in the script. I use script manager because you can put all your scripts in one spot In ezb.
You don't have to use the Cheat Sheet if you already know how to write the code which I see you already have. However it keeps you from typos.
Good luck,
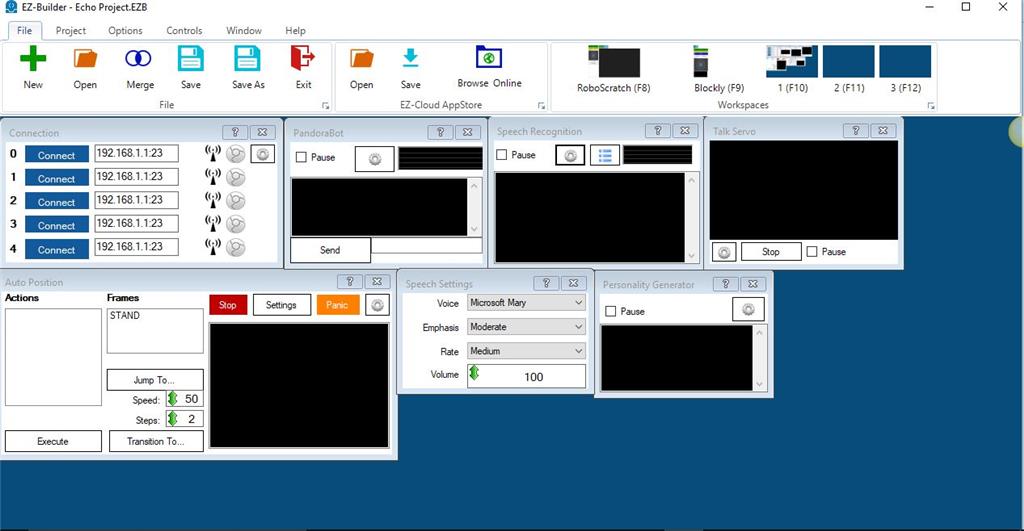
I wrote the code using the example codes it was showing what to use and went from there. I"m fairly new to the ezb builder where do i go to open a new script to get to the script manager. It might be a silly question, but i rather ask than pretend to know where everything is, but i learn really quick. Here my current project
Click on the tab at top named "project", then click the add button, again click scriptsing,a new window pops up in there click on EZ-Script manager.
The new script manger is added to your project. Then just click add script, on the top left side put the name "Head Movement for greeting with Speech"
Add you code. Remember there are many tutorials in the learn section on ezb's web site, wish Dj and Company and all the community have took a lot of time creating.
Good luck and look forward to a video . Cheers
Yes thank you and there very helpful the ones I have looked thus far. Just one more question for now just to make sure I'm on the right track. Because I cant test the servo actions until the controller board gets here, but I take it I have everything right in the code on the left side. the servos are for her head tilt left and right your head turn left and right and her eyes to turn left and right
Your almost there. Not sure because I can't see the name of your script, does it have the same name as your AIML "Head Movement for greeting with Speech" without the quotes? Also the code with the servos are examples. so if you use this example make sure when you get your controller to put each servos(s) on the Corresponding digital ports, d0, D1 and D2 that it shown in your code. Not sure how many servos you're going to be using for the movement.
and just so you don't break any parts make sure the servo port settings are what you want before you put it all together. each robot is different e.g. Depending on your servos you can go 1degrees to 180degrees Each robot is different and it depends on what your rest position is going to be when you put your servos in place on your robot.
Hope this all makes sense good luck, I'm heading to bed. sleep