
Carlitos prime
Canada
Asked
— Edited
Camera Motion
Hi guys! I have been trying to get my box robot up and running but cant get past the camera tracking. It just wont follow me or any colors. I have checked with motion control and everything is A O.K! I just find that the videos for helping are dated when it comes to the new software which becomes frustrating and at times over whelming! I must be getting it all wrong with the Script for Command Contrals! But what D.J Sures suggests does not exist anymore on the list! I love Robots and would just like some help! PLEASE! I have the new 16.0 version. Thanks!

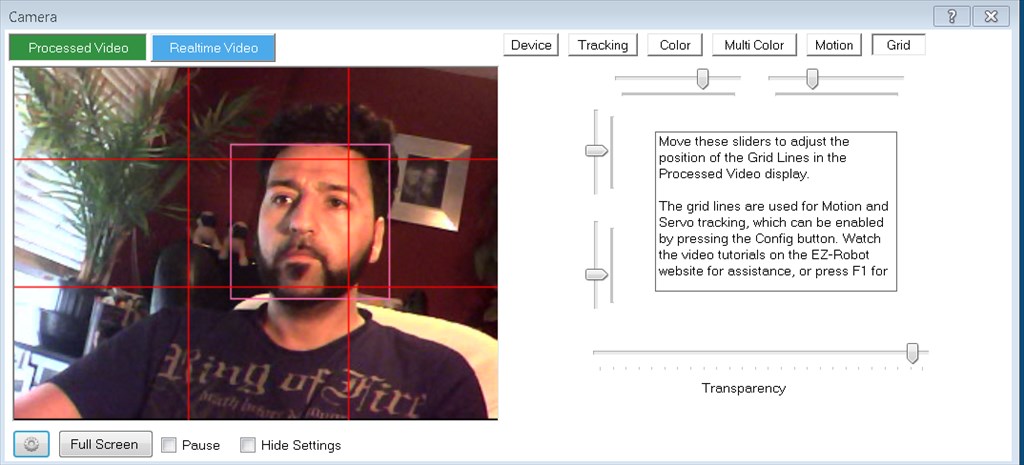
Here are Melvin's settings for the camera when face tracking is enabled.
You will need to adjust your grid so it knows when it needs to move to follow.
Hi Rich I tried camera tracking last night and it the software tracks me on screen (great) but the servo just whizzes the camera in my Omnibots head way off. Its as though the servo response has been magnified. Before I used to get very accurate tracking the servo would re-assuringly 'click click click' as I moved a tracked object in front of the camera. So be interested if Melvin works like that?
I haven't tried running Melvin on the new software, I'll give him a test tonight to see if something has changed.
Thank you I'm going to put together another EZ-B board and servo camera to see if I have any another issues that's causing the problem
Thanks Rich! That did help a bit. It moves now but just like Winstn60 mentioned, I'm having the same issue! It just doesn't follow smoothly or accurate and I adjusted it. It wont track me vertically. When I check " Track by relative position it goes everywhere and spots me but doesn't stop. I really think there is a glitch in the new software. Let me know how you guys make out with this? Thanks!
Don't tick track by relative position, I believe that is for if the camera isn't mounted on the servos or something along those lines.
Horizontal and vertical increment may need adjusting, although I haven't played with the camera much lately so can't be sure, I will check it all out tonight. I doubt it's a software glitch as DJ loves the camera control and has mentioned how much better it now runs, so I assume there was substantial testing done on it.
I just noticed that my tracking speed in the image looks like it may have been reset on the update (or I might have messed it up at some point), it might be to do with that too, play with the slider and see what happens.
You may also need to adjust the servo speeds, I usually do these in an init script, in fact I know I have servo speeds set up so the head moves slower.
I'll post more in about 3 1/2 hours when I get home
Nope, Melvin works better than ever with no settings changed.
However, I do have an init script running which sets the servo speeds for the pan & tilt
We have added hundreds of little question marks next to every option. Hover your cursor over the blue question mark to read what it does