Asked
— Edited
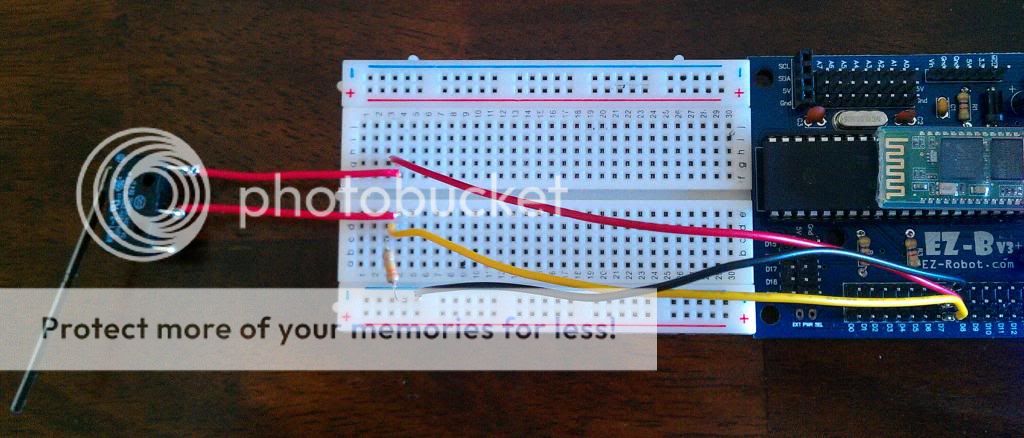
Bumper Push Button Digital Switch
330 ohm resistor used in picture Bumper push button switch

 Miscellaneous Utility Plugin
— ARC utilities: DataQuery for SQL/ODBC/OLEDB/Excel with parameterized queries returning array variables; Ticks/Millis timing functions.
Try it →
Miscellaneous Utility Plugin
— ARC utilities: DataQuery for SQL/ODBC/OLEDB/Excel with parameterized queries returning array variables; Ticks/Millis timing functions.
Try it →
330 ohm resistor used in picture Bumper push button switch

Nice.
Out of interest, why on a digital port?
This can also be done using the analogue ports and a simple script to monitor the ADC, with multiple switches per port... useful if like me you have used all digital ports with servos, switching circuits and sensors.
Um, well. I guess I thought switch is on or off so it seems a good fit for digital. I believe you when you say you can do it different ways. I'm sure you could go the route of muxing, shifting and adc multiple resistances monitored via script but those concepts I have yet to explore. I was struggling with a bumper switch, lol. I am guessing the above post is the easiest way to do a switch with EZB but I'm not really sure of that either....
Actually this is great for me. I've got the opposite problem from Rich; I've used all my ADC ports and will need more switch monitoring options. Being able to use one of my open digital ports is a blessing.
Have you got a script that will notice when the switch is pushed? Would you share it if you do?
Thanks, Dave Schulpius
@ dschulpius here I have a very simple example of changing the robot trajectory to collide and activate the switches using digital ports (in a rather old version of ARC by the way):
Ahh, thanks. I now remember seeing this a couple months ago and forgot all about it. Very nice!