Robotz012248
Back Again With The L289n Question
I am back again with the same problem with the motor driver. First, I have been experimenting for the past 3 weeks! without sucess! I have watched the L289N tutorial at least 2 dozen times. With out sucess. I really need some assistance here!!!! I have a lot of time and money invested in my robots. I think it is a reasonable expectation to have them operate correctly!!
I have exactly the same problem with "Gizmo" and "Servo" (Servo is a Radio Shack Robie Sr.)
The robots will move forward and reverse as they should; but left and right are reversed!
I assume that the H-bridge control is read as; top arrow is forward; bottom arrow is reverse; right arrow is right; and left arrow is left. Have I assumed correctly?
The configuration I started out with is as follows: IN1 to D18 IN2 to D17 IN3 to D16 In4 to D15 PWM to D19
Since then I have tried every configuration possible. ie; changing around all of the triggers, one at a time. I've tried reversing the motor output leads from side to side and reversing the motor leads at the screw terminals. Believe me when I say I have tried every configuration!!!!! I find it difficult to believe that I have gotten 3 of the motor drivers that are bad. What are the chances of that??????? Since I have the same problem on both of my bots leads me to believe that I am making the same error on both! So, I"m asking for some help here! I have 2 robots sitting here that I can't proceed with until I get this problem resolved. I would REALLY appreciate any help in resolving the problem. I'd be so very dissappointed if I had to just let my projects sit on a shelf unused. As I always do; I thank anyone in advance for any assistance.

Your configuration needs to be reversed if the controls are reversed. It's impossible to understand how you have the motor polarity or hbridge settings per robot configuration. That is why there is a confit button in every control. With the confit button, you can customize settings.
Good luck!
Perhaps I am stating my question in the wrong manner. Does ANYONE have a configuration that works with an Omnibot and/or Robie Sr. and the L289N motor driver? If so, would you please share it with me? I've tried everthing I know to try. Again; I have tried changing the signal wires to every possible configuration as well as the motor output leads. I have watched the motor driver tutorial over and over. I have also tried looking at the configure (question mark) multiply times. Any help would be greatly appreciated. I'm stumped!
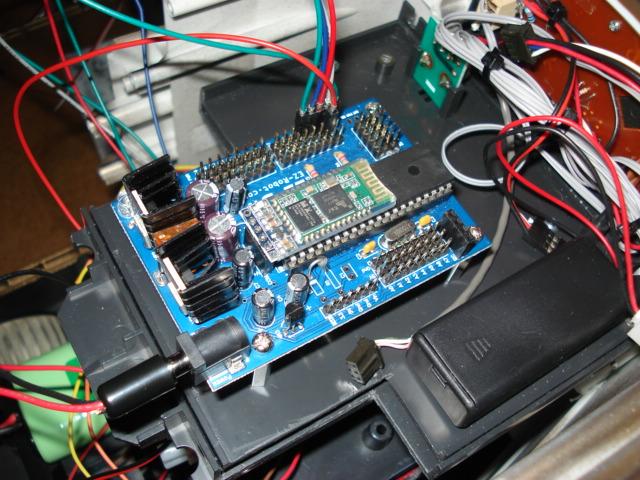
I will post some pictures later today as my camera battery is charging. In the meantime here is a description of my hookup.
Main battery positve goes to a European style terminal strip. Red lead goes out to power terminal on the EZ-B and to the VCC on the L289N Main battery negative goes to terminal strip then out to power terminal on the EZ-B and to ground on the L289N.
Red wire from +5 volts on the L289N to the +5 volt pin D0 on the EZ-B
Right side motor wires (Yellow and Orange) on my Robie Sr. goes to the L289N motor out pins 1 & 2 (Yellow wire to motor out #2, Brown wire to motor out #1 Left side motor wires (Red and Brown) on my Robie Sr. goes to L289N motor out pins 3 & 4 ( Red wire to motor out #3, Brown wire to motor out #4)
L289N IN 1 goes to EZ-B pin D1 L289N IN 2 goes to EZ-B pin D2 L289N IN 3 goes to EZ-B pin D3 L289N IN 4 goes to EZ-B pin D4 EZ-B signal pin D0 is assigned as PWM and set to 75%
H-Bridge configuration is: Left trigger A = D1 Left trigger B = D2 Right trigger A = D3 Right trigger B = D4 clicking on right arrow makes robot turn left clicking on left arrow makes robot turn right
What have I missed?
Try this in your H-Bridge Configuration: Left trigger A = D4 Left trigger B = D3 Right trigger A = D2 Right trigger B = D1
That's what fixed my same issue & it's what DJ means by "Your configuration needs to be reversed"
There should be no ground going from your main supply battery to the L298N.
You should have the following: (Assuming you have a 12V source for main battery)
+12V (Red) to Vcc L298N +5V D1 to +5V L298N GND D1 to GND L298N WHT D1 to IN1 L298N WHT D2 to IN2 L298N WHT D3 to IN3 L298N WHT D4 to IN4 L298N
I'm at work so I can't confirm wiring for motors. Of the top of my head I had Brown/Red one side and Yellow/Red the other side.
Cheers!
@ Lumpy:
Thank you very much for your reply. It is most appreciated! I will try the configuration you are suggesting and see how it works. I will still try to get some pics posted later today.
You HAVE TO run a ground from the battery to the L298N! If you only hookup the ground to the EZ-B, your drive motor ground current will be running through the EZ-B circuit board, these sized motor will still run but it's very bad practice. The whole point of a motor controller is to burden it with the motor current, not the EZ-B.
I don't see it being hooked up in DJ's video.
The only ground connected is from the EZ-B D15 to the L298N in his video.