
Noobot
Canada
Asked
— Edited
Are Solenoids Available?
I have recently bought the EZR kit, but the servos only rotate in a circle. I have since learned that there are things called solenoids which don't rotate but move linearly like a pogo stick. I can't find them here. Are they available?

Solenoids This is just one source....but I am pretty sure solenids require an H bridge much like DC motors....You coulkd make a "linear activator" with a fine threaded rod and a modified servo!
Solenoids are used a lot in the Pinball hobby. irobot58 is right in that you cant run them directly from the EZB board. You will have to make a switching circuit out of a transistor & diode. Very easy to do. Once built and connect to EZB you can use ARC to switch the digital port that the transistor is attached to and turn on and off your solenoid.
One problem with solenoids is they get hot when held in the energized state or used a lot. If you use a solenoid you must also install a blocking diode across it's two power lugs in the proper direction. If not a voltage spike will slam back into your control circuit and destroy it.
irobot58 is also correct and has a great idea about using a threaded rod and a Servo. That may be a lot easer. ARC does a great job controlling servos.
Maybe my current kludge is the easiest way. I am currently using a rotating servo with those plastic arms attached to it. When the servo rotates right, it presses one key. When it rotates left, it presses another key. So I get two key presses with a single servo, unlike a solenoid which would be limited to one key per device. The only challenge I have at the moment is making sure that the force of pressing the key doesn't pop the plastic arm off of the servo. Is there some trick to holding that arm in place? Am I supposed to glue it? Or screw it in? PS. I'm not sure how a fine threaded rod would fit in a servo. Are there any pictures to illustrate what you are both thinking there?
EZB is very precise in it's control of servos. Once you get the proper spot to have it stop it will stop there each time. So no need to worry. If your really worried about the horn popping off I guess you could glue it in place.
A lot of these "ideas" we have have, have never been done with EZB. They usually reside in our heads however I'm sure other robot clubs have used these building ideas. EZB is a new platform being only a couple years old and evolving and growing all this time. Look through the projects on this web site and others to see how others have built there robots. You may see something that could help. I'm sire if someone scan help they will post some pics for you. Sadly I don't have any that could help you. tired
Sadly I don't have any that could help you. tired
Good luck and keep in touch.
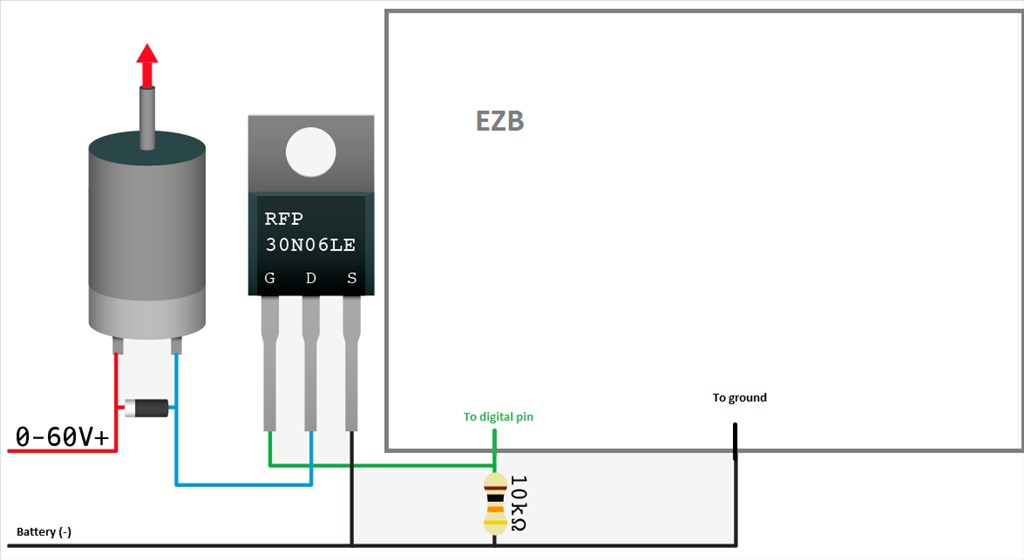
Here is an example using a MOSFET. (Our favorite thread) There was a lot of discussion about using TIP120 which is nearly the same functionally but the mosfet uses less power. I googled the above image but edited the EZB block in.
Thanks Troy for taking the time to post this. This is exactly what I was talking about.
An other way to turn a solenoid on and off would be the switch circuit I use for my Laser and Flash light that Rich posted to me.
On and Off switch
No problem. I edited the above to add a search for TIP120 threads. Noobot, just remember that the diode is required for ANY device which uses a coil (inductive motors and solenoids) but otherwise you wouldn't need the diode. The problem Dave mentions is due to the magnetic field which is briefly present after the current is removed. The magnetic flux lines pass through the coil as the field collapses. That induces a brief voltage spike. The amount of voltage varies with the coil size and the amount of current but it's truly irrelevant since it's most certainly too much for logic circuits to handle. This circuit and others give a safe path for the excess current when the coil is shut off.
EDIT: OOPS he beat me to it.