abdullah1
Kuwait
Asked
— Edited
Ar Drone Landing On A Moving Target
Hello.
I am currently trying to make my Ar Drone track a moving a coloured object with the bottom camera and then land on it. How would this be possible in Ez-Script? I have successfully been able to make the camera track an object but not sure how to land on it while its moving.
Your support is greatly appreciated. Thank you.
Abdullah

You definitely wouldn't be able to just hit "land" as that stops it moving forward. you would need to manually command it to descend while moving forward tracking the object. Might be a bit of a feat, but doable I would imagine.
The Drone might have altitude limits that will prevent you from manually landing it. Have to try to know.
Yeah, you got it. The drone will land with the land command, but once it starts landing, it'll do its own thing.
You can switch to the bottom camera to detect the object. Ezscript would need to be written to navigate, but that's easy.
Creating a script like this would do it... Just change to COLOR rather than GLYPH
Example project: https://synthiam.com/Community/EZCloud/RobotAppDetails.aspx?id=4471
For the latest ARC Software to work, which model or versions of the AR Drone will work with it?
ARC will work with either the AR Drone 1 or 2. Compared to many available today, neither is very good, but the 2 is significantly better than the 1 as far as consistent control.
Alan
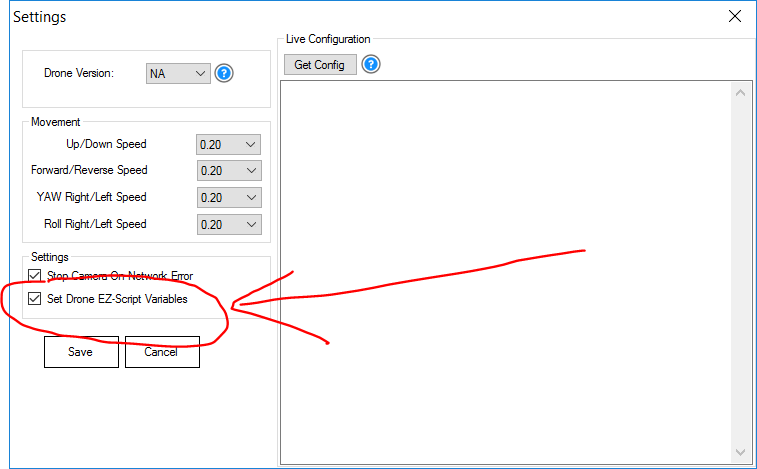
Every control has a question mark next to the close X button. Pressing the question mark button will direct you to a manual page for the respective control.
Here is a direct link to the ar drone control manual page: https://synthiam.com/Tutorials/Help.aspx?id=160
Many thanks guys I will give try it on the drone. Thanks for the great support and for such a great software.
I have seen the AR Drone 2.0 for sale at one of the local Barnes & Noble Stores. Does the v2 version mentioned in this thread correlate to the AR Drone 2.0? Also, does ARC work with the newer Parrot B-Bop drones?