

Hi All
Introducing the AIMEC:EZ1
We are in discussions with DJ to produce a special version of our AIMEC (Artificially Intelligent Mechanical Electronic Companion) robot for the EZ-B, this will be a very advanced robot that will be made available in kit form, which will probably be by the end of this year.
Some history, the first AMI (Applied Machine Intelligence) robot was the AIMEC:3 which is a "hyper-tech" toy and we were very close to licensing this design to a large US toy manufacturer, but the deal fell through. Our most advanced robot is the AIMEC:4 which is still in development, this robot has advanced voice recognition (Dragon 11), face recognition and eye tracking and object recognition the robot has an advanced Ai core and is capable of self learning. When we came across the fantastic EZ-B system that the genius DJ Sures produced we immediately thought that it would be really cool to make a EZ-B version and this is what we are currently developing the AIMEC:EZ1. This robot is the development platform for a ground breaking robotics kit that we plan to sell to the general public, for the first time a highly advanced robot will be available (in various versions) at a price that hobbyists would be able to afford.
I have been building robots for over 30 years and some of my designs are recorded on Cybernetic Zoo
https://cyberneticzoo.com/?p=2280
https://cyberneticzoo.com/?p=3984
On our team we have the brilliant model maker (and engineer) Steve Cole (Articole Studios) https://www.articolestudios.co.uk/ who is also a member of this forum @ukrobotman, with Alex Cole on 3D design and (the incredibly talented) Mike Hodgson on software development. I am doing mechanical, electronics and sensor designs and firmware development for support PIC microcontrollers that enhance the EZ-B boards operation over the I2C bus.
We are all looking forward to working closely with DJ and his team in the new future!
Tony
-- Conceptioneering Ltd - Inventors of the Award Winning Cube World To see Product Innovation - visit our website at www.conceptioneering.co.uk To see Robotic Innovation - visit our website at www.appliedmachineintelligence.co.uk

Hi Tony,
I've been lurking in the background these past few months and watching this thread and your progress with amazement. What got my interest was how great your Speech Recognition works. Although Microsoft Windows SR is working OK for me (kinda) in full sized B9, I'm still not satisfied. I'm dreaming of the day my robot will respond like the computers on Star Trek and other Si Fi shows do to SR commands. I see your creation being closer then any other I've seen. Now I'm seeing the Smart servo your developing and am again super interested. I find myself asking "how can I get these systems and servos into my B9? I'm looking forward to seeing the final result and how you are able to integrate this all into EZB. I have three EZB's controlling my B9; one in the leg section, one in the torso and the 3rd in the bubble. EZB controls them great but like I said I want a better SR then Microsoft can give.
Also I'm to the point with my build where I'm designing my B9's arms. They are long and heavy. Made out of rubber with plastic claws and wrists. Then need to retract from full extension (about the length a humans arm) to fully tight to the body. I want them to do at least that and also the claws to open and close and rotate. Where I see your design helping me is the elbow. I'm thinking if your new servo can lift the load of this arm and claw I could slip a design like your into the rubber are of my B9 and have a arm that bends up and down. The original TV robot had a man in the custom and the arms looked great. With some modification Your arm design would work great. Here's a pic of my robot with the arms attached (no claws) but hanging:
You say they are strong and silent. How much weight will they lift at the extension length of a mans arm and will they hold up to this kind of pressure and use?
Very nice work, Dave Schulpius
@Toymaker, I am also interested in the 12 volt servos and would like to know your source if possible! Also can they rotate 360 or at least be modified to do so? Once my own robot is done( well as done as possible as anything worthwhile is always ongoing ) I would be interested in your Aimec robot. I also really like your trouble shooting debug pic and LCD diplay. Thanks so much for sharing it
@Dave yup it is fun to be "reenergized" again by others innovations and...passions. Are you designing the arm mechanisms because if you are this instructable link might be helpful! (ignore the arduino part ) https://www.instructables.com/id/Animatronic-Tentacles-with-Arduino/
) https://www.instructables.com/id/Animatronic-Tentacles-with-Arduino/
Hi Dave
Glad you like the EZ:1 robot. Here are some pictures of the new arm attached to the EZ:1 body, (I am still working on the shoulder smart servo). Yes I think these could work well in your B9 arm and should fit inside the arm tubing.

One of the things that make all this work are the very neat amazingly low cost Bosh servo motors (with feedback potentiometer) that Pat (@Bravia) pointed me to, you can see them here.www.ebay.co.uk/itm/BOSCH-12-VOLT-VARIABLE-SERVO-100-MOVEMENT-GEARED-NEW-/380343639810?ssPageName=ADME:X:AAQ:GB:1123
At an unbelievable price of 6.99 each! Problem is, Pat said they will not ship outside the UK, so I have bought quite a lot of these units and sent some over to Pat in Ireland (hope they arrived ok Pat?). I would be happy to send you some over Dave (free of charge), but I not sure how much the postage would be?
In the servo motor drive, you get an amazingly powerful worm driven motor that generates huge torque at a very low run current.
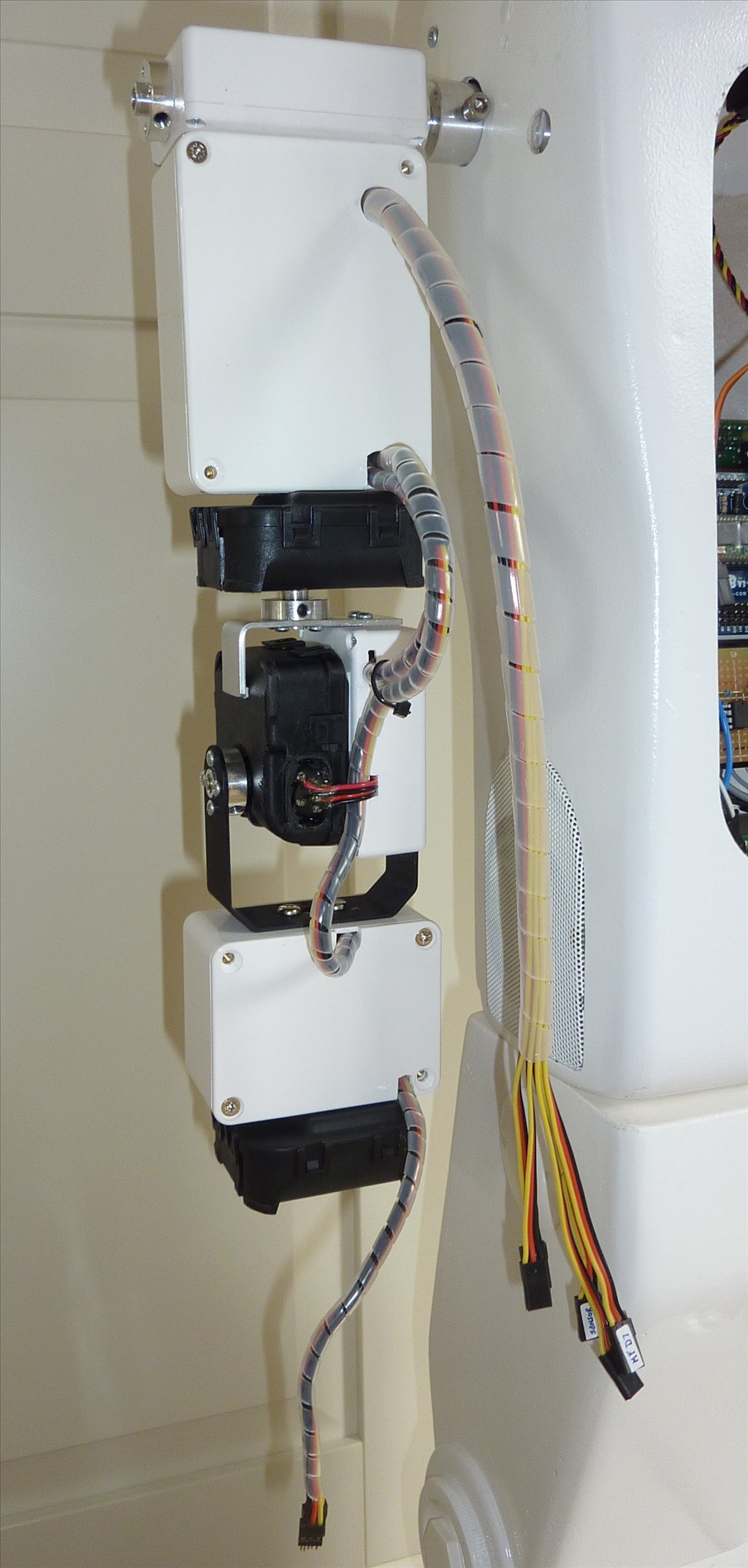
What I needed to add to make the whole thing work was a microcontroller that gives it the "smart" features and a H bridge with motor current sensing all on a small PCB. The servo drive could be controlled via an external H bridge which in turn could be wired to the EZ:B with it reading the pot, I think you have done this on your B9, but I did not want the run-time overhead that this would produce on the software side. The EZ:B just sends a positional command and the smart servo does the rest and continually monitors for stalls and errors like not acquiring the target position within a specified time. Also the servos are so quiet that you can barely hear them moving!As you can see from the photo, there are no end effectors connected, this new arm allows various types of hands/claws to be added. We so far have 2 end effectors designed a low cost simple claw and a 3 fingered hand.
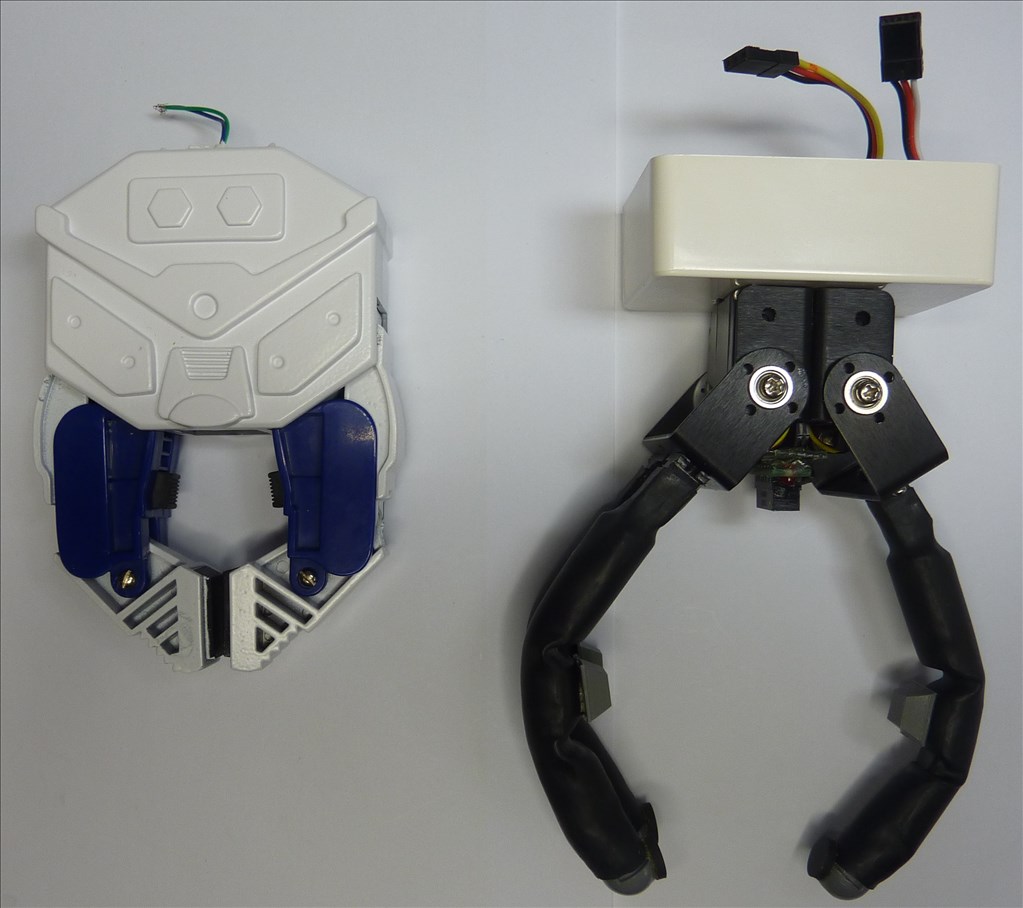
The arm as shown can easily pick up a full can of drink and hold it horizontally with no problems (totally silent). I have not fully tested the full pick up force yet, as I need the final shoulder smart servo fitted. They are automobile grade units so they should have a long lifespan.@irobot58 The original servodrives do 100 degrees, but it is possible to extend this in the firmware on the microcontroller, the wrist on the EZ:1 servo does 180 degrees. You do need to remove the mechanical end stops though.
Tony
Thanks so much for the information and offer to send me over some of these cool little motors. I am very interested but don't want you to take the hit on either the cost of the motor or the shipment. I would gladly pay full cost of both.
With that said, I'm just a little confused on how this all works mechanically. Forgive me if you've already described all this. It looks like there are two parts to your Smart servo; the 12v Bosh servo motors (with feedback potentiometer) and the little white box it's attached to? If I'm reading this right in your past posts you have a controller board you've made with the microcontroller and other circuits to give it the "Smarts" you mention. That must be inside the little white box?
If this is the case I am totally interested not only in the motor but also the technology (your controller board) that make it all work. I assume if this is what will make me happy I need to wait and buy the whole kit when it comes available. Do you "foresee selling any of these parts as "Stand alone"? I'm mostly interest in the SR and arm servos. If I buy the kit I'd be taking it all apart and retro fitting and modifying it into my B9. Like I mentioned above my arm will need to retract from full extension (about the length a human arm) to fully tight to the body. Also, the claws need to open and close and rotate. If I can get your elbow design in there that would be a huge deal!
I'm completely willing to help implement your new boards and motors and work out the bugs. Like you mentioned I have DC motors working now in B9 and have EZB monitoring the poisons with external pots attached to ADC ports but your method seems much less primitive. I may need a little help implmenting the technology and adapting it to EZB but I think I've got the building part worked out.
@irobot58 , Thanks for the link! I'm heading over there right now to take a look!
Thanks again for your help and the work your've already done, Dave
Dave
If you want the servo drives to work on their own, you need a control board like this
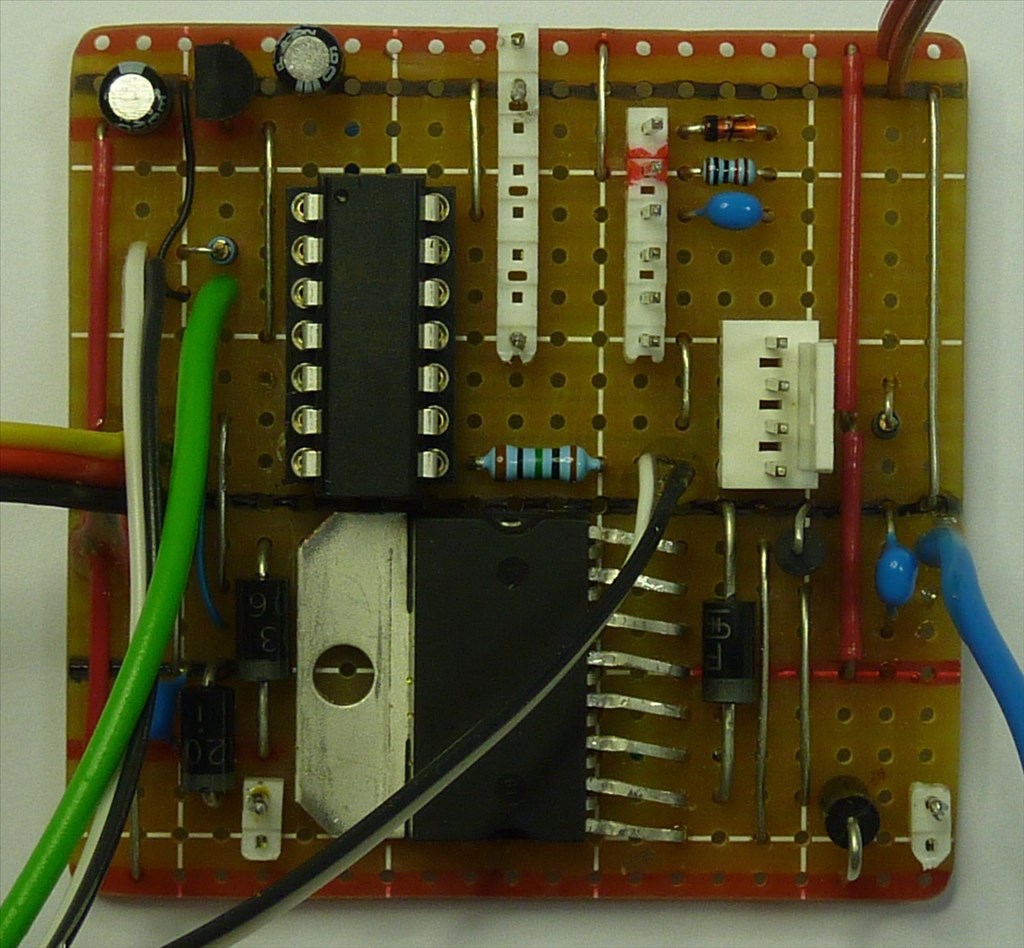
It uses a PIC microcontroller with firmware that I have developed for the smart servo and has the H bridge etc. As this is in development stage, it is still on prototype stripboard. I will be producing a dedicated PCB in the month or so when the design is totally finished. I would be happy to let you have a few pre-programmed PICs as well as the motor drives, but you will need to make up the stripboard circuit yourself. If you dont mind waiting until I have the servo boards done and the first batch delivered then I can let you have a few of these as well, but I am not sure when this will be. If you cover the postage, then Its all free of charge as I feel that it's good to help fellow robot builders especially people that are so dedicated that they produce a robot of the quality of your B9!I have a friend here in the UK (Adam) that has also built a full size B9, here is a video of the arm mechanism he put together.
On the SR, I wonder if some of the problems you are having is because of the mic? The AIMEC;3 and AIMEC:4 robots use DNS11 with almost 100% accuracy. The EZ:1 robot currently uses Microsoft engine 8 as the robot is controlled by an EZ-B and I have yet to make the DNS link with ARC. But I still get really good accuracy with engine 8 in grammar mode (dictation mode is not so good, but grammar mode is what you use with ARC), but I use a really good wireless mic that just clips to my shirt pocket or collar. This works so well that I can even control music volumes etc as the SNR (signal to noise ratio) is so good with regards to my voice. I use the Revolabs xTAG its pricey but you have to pay if you want this level of performance.revolabs.com/Products/Product-Line/XTAG-USB.aspx
Hope this helps
Hi Tony,
Thanks for the kind words about my robot and also thanks so much for the advice on the mic. The one you mention looks like it will work nicely. I might have to go with this to get better response. I wanted to try to stay away from having to wear a mic. Right now I'm using the Blue Snowball and havein it pick up commands from the desk top. I've been having good success with this setup but only when there's not a lot of background noise. All bets are off when there's a group of people milling around.
I've seen your friends video of his B9 arm many times and have been Very impressed. I fact I had planned on building my own based on his version. I was hoping to somehow modify it to add an elbow and when I saw your creation the gears started turning in my mind! All I need is a small enough elbow motor to fit in the 5" rubber arm with enough guts to lift the forearm and claw (and of course any servos and brackets that will operate the claw) and a way to control it. Then I'd also need a motor of some kind to suck the arm in and out.
I love the way you have incorporated an H-Bridge into your control board and have the PIC microcontroller taking the heavy lifting from the EZB. I do know I want to somehow work this into the arms of my B9 but I only hesitate because I don't know yet how to utilize them. Perhaps I should start with a couple motors to see if they are strong and quick enough for how I want to use them. I'm in no real hurry and maybe by the time I have it figured out you'll have the boards ready to sell. I'm no stranger to making my own homemade control boards but I'd rather have a master like you make a proper one. Should I contact you off this forum to arrange shipment and payment?
Thanks again, Dave Schulpius
Dave, The wireless mic is perfect for operating the robot in noisy environments people talking in the background etc, it was designed to do this. The other neat thing with the xTAG is that its so small, that when its operating in my shirt pocket, no onlookers can see it at all so they assume the mic is based on the robot.
Thats a good idea about trying out the servo motor drives first, I can spare 4 motor drives and I am honestly happy to donate them to your robot build. You can email me at toymaker(dot)tony(at)gmail(dot)com
Adam is a brilliant robot maker he has made full size Daleks, R2D2, B9 and a Wall-E. Here is my half scale Dalek with Adam's R2D2 at a UK Robotbuilders meetup
I have an idea about building the ram part of your B9 arm, possibly using Meccano. I use Meccano all the time to try out mechanical arrangements, and it is possible to still buy Meccano parts.
www.meccanospares.com
The idea is to use a threaded rod to drive a 3 bore coupling
www.meccanospares.com/shop/article_63-BR-N/3-Bore-Coupling.html?sessid=SDbFjC0SmZy8X8FW2dQbzPBrOat0vfaSJjB6J2IlzCcfrd61H8jx9Hln5dC1eMze&shop_param=cid%3D46%26aid%3D63-BR-N%26
The middle thread is driven forward/back by the rods (center) thread and the hole thing is kept stable by 2 axles in the side (non threaded) bores, the whole thing retracts to the length of the threaded rod. The threaded rod is driven by a motor, end stops would be via a magnet mounted in the retractable part and reed switches in the end stop positions. When the retractable part gets to the stop positions the reed switch makes (detects the magnet) and flags the controller (or EZ-B) that the motor must stop. Meccano parts are pretty strong, so may be good enough for your application as long as the claw is not picking up too heavy loads. It would be easy to mock the mechanism up in Meccano to see it all working and then scale it up (say to 6mm rods) if you need something stronger.
Tony
Tony, that's a fabulous idea! A screw crank balanced by two rods. Now you've really got my mind gears working! Thanks for the thoughtful input and also the links to help me put it together. You've also sold me on the mic. I'm going to go ahead and order one.
Hey, I really feel bad about hijacking this thread and working through a couple of creative blocks I was having on my robot. I'm going to stop talking about me now and wrap up my business with you on the motors off forum. Can I reach you through the e-mail link you posted earlier in this thread?
I'm in love with your half scale Dalek and how you've animated it. The vids you've shared with us have made my mouth water. If I ever finish this B9 I've got to find the time to build one.
Anyway, thanks again for all the help and ideas. I cant wait to see what rolls out of your work shop.
See ya off forum, Dave