
luismo70
ARC Freezes And Robot Disconnects
Hello,
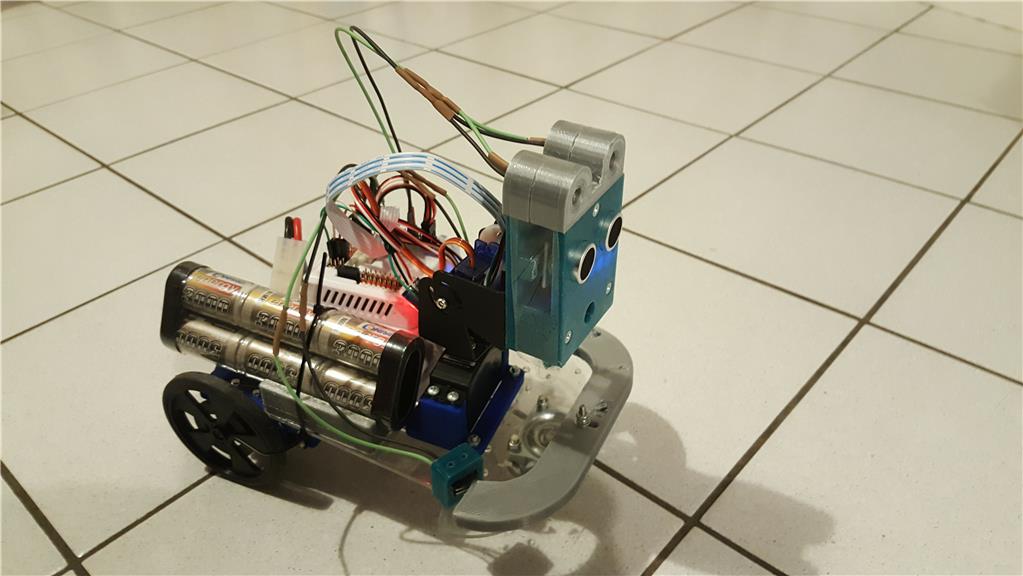
I'm building my Ez-Robot from the dev kit EZB4 from one year (yeah I only have a few hours during week-ends). I followed tutorials and all were well, all right with servo motors, camera (It's difficult for me using tracker of objects and colors... so for the next time). I printed some 3D pieces and I build that.... picture:
BUT suddenly, for a few days now, maybe a week, nothing works, the ARC software freezes (I did all updates), my robot disconnects and servo motors turn crazy. I need to kill the software from Task Manager in Windows (Windows 10), turn off my Robot, and when I connect it again, the same tragedy comes...
Please I don't know what do do now, I checked my wifi network, changed channel, disconnected a few devices, but always the same scenario.
Maybe you know what occurs.
Thank you.
Luis

You must provide adequate power source for the robot. The AA batteries are not providing enough power and therefore the ezb is browning out.
Use a more capable battery, such as a LiPo Robot Battery 7.4v 1300mAh combined with LiPo Battery Harness
Pretty cool little robot! He'll be happy with adequate power supply
@DJ
Look more closely, pretty sure that is a LiPo pack.
Do you have any I2C devices on the robot, or defined in your project? If in the project, but not on the robot, delete the controller. If on the robot, check the cabling. ARC will lock up if it tries to communicate to a non-existent I2C device.
Alan
I noticed that you are using third-party servos for pan and tilt, and you seem to have a 7.2V NiMH (or NiCd) 3000mAh battery pack. Are these third party servos rated at 7.2V? You may have damaged them if they are only rated to 6V and there are no voltage regulators connected to them. They could be causing issues if they are damaged.
Otherwise, are you using any I2C controls or polling any analog sensors extremely quick?
*Edit @thetechguru beat me to the I2C question but the battery pack is definitely not LiPo, it's NiMH or NiCd.
@Alan... actually it is a subc 3000mAh niMh or niCad pack.... At any rate it's probably a power issue as @DJ mentioned...
@Jerimie... yes it looks like one or more 6V micro servos there as well.... And you're right they don't like higher voltages than 6V
Yeah if it's an older NiCd pack it can definitely go flat pretty quick. I have a few of those at home that don't last for very long after being charged due to the memory effect. They are the same as older drill batteries.
Ah, NiCD. I was looking from my phone so couldn't zoom in. Could tell they weren't AA. Didn't think anyone used NiCD for anything anymore.
Alan
Taking a closer look at it I think it's a Conrad Energy 7.2V NiMH 3000mAh battery pack.
Ah - i was on my phone and they looked like AA's. Either way, it may be a brownout if the battery pack is tired. The usage log shows the connection lasts for a few minutes before disconnecting. The voltage on connection is quite high for those servos (reporting EZ-B voltage is 7.705555830).
There's a slight chance it's a programming infinite loop or something.
@luismo70 would you mind posting your myrobot.EZB project here for us to look at?