
Asked
ARC And Python Interface For Robot
Here is an overview and description of the software structure for the ARC and Win-Python interface, which I’ve implemented successfully for my 36-servo humanoid robot. The system is designed to be stable and performant, ensuring smooth operation of the robot. Below, you'll find some images illustrating this setup:
[Image 1 of 4]
[Image 2 of 4]
[Image 3 of 4]
[Image 4 of 4]
By leveraging the powerful features of Synthiam ARC, along with Python scripting capabilities within the Windows environment, I’ve achieved a robust symbiosis between software components that allows for precise control and coordination of all 36 servos in my humanoid model. The images provide a glimpse into the setup and operation of the system.

The native Python robot skill wasn’t completed. But it’s mostly working. I think the reason is it didn’t jump out to us as a useful addition. I can have it pushed out to see what can be done. But the thing is, only one copy of it can run. That means you have to add the entire Python code into one editor. It becomes a large unmanageable code. That’s what I try to avoid - but if it’s useful I guess we can finish it.
what I’d like to see is events from the Python script. For example, when servos move in ARC to have an event called for the Python script. Python is kinda weird with events. It’s not implemented naturally and we’d have to do more research to find a usable approach that’s dynamic enough to be useful.
but to be clear.. I don’t think we have a full grasp on how to implement the two environments. It would take time to figure that out.
Virtual COMs: The Door to the Outside World
Fundamentally, I don't believe that full integration of Python into ARC is necessary or even useful. Although Python is quite popular, especially with regard to AI, there are of course other interesting languages that could be considered.
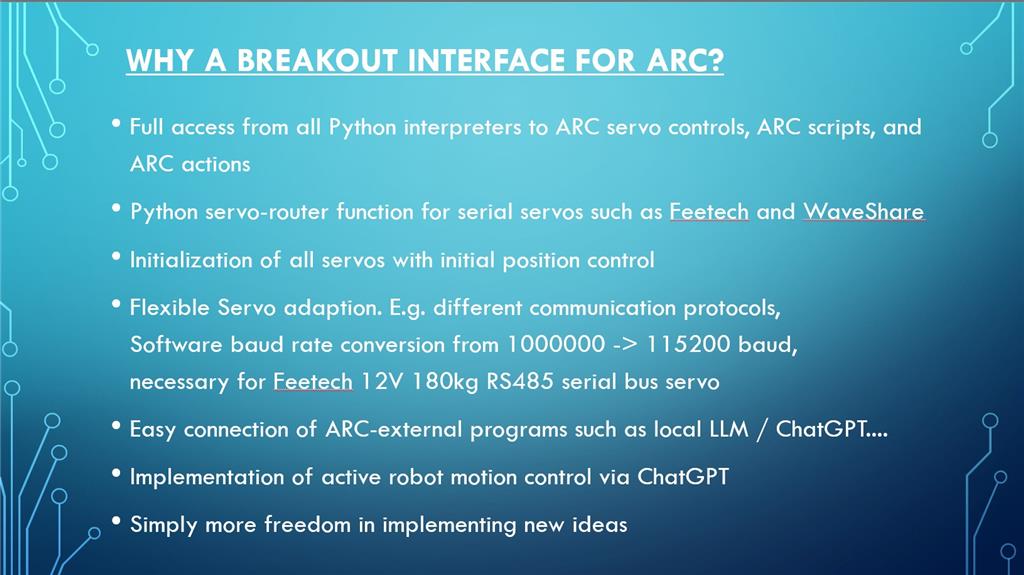
With the "breakout interface" discussed above, it is easy to initiate ARC scripts, actions, and direct servo movements from outside ARC and conversely, to initiate ARC-external processes, in my case, Python programs from within ARC.
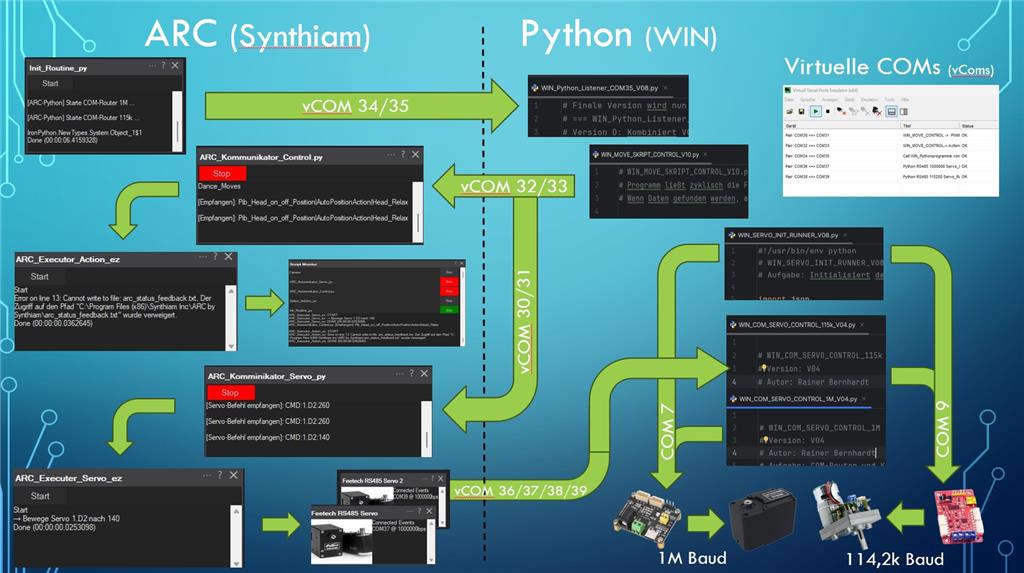
In addition, the servo commands from ARC are not sent directly to the real hardware COMs, but rather via virtual COMs to Python "servo routers" outside ARC. The "servo router" can access the servo controller directly via the hardware COM, route ARC commands directly, or, for example, adjust the baud rate, or query servo information such as temperature values, current values, etc., and communicate this back to ARC.
In principle, that's all there is to it, but these communication channels open up many interesting applications.
For example, selected ARC actions can be provided to GPT in a JSON file with aliases and runtimes. Using a prompt, GPT can then automatically and contextually select an action/movement from this library and thus control a robot independently. This isn't a best-fit process, but rather GPT's "free decision." Sometimes it's funny, sometimes it's frustrating.:(
sometimes it's frustrating.:(
The idea pool for implementing interesting applications via the interface is brimming, especially since there are so many ARC skills that can also be used with external programs and vice versa.
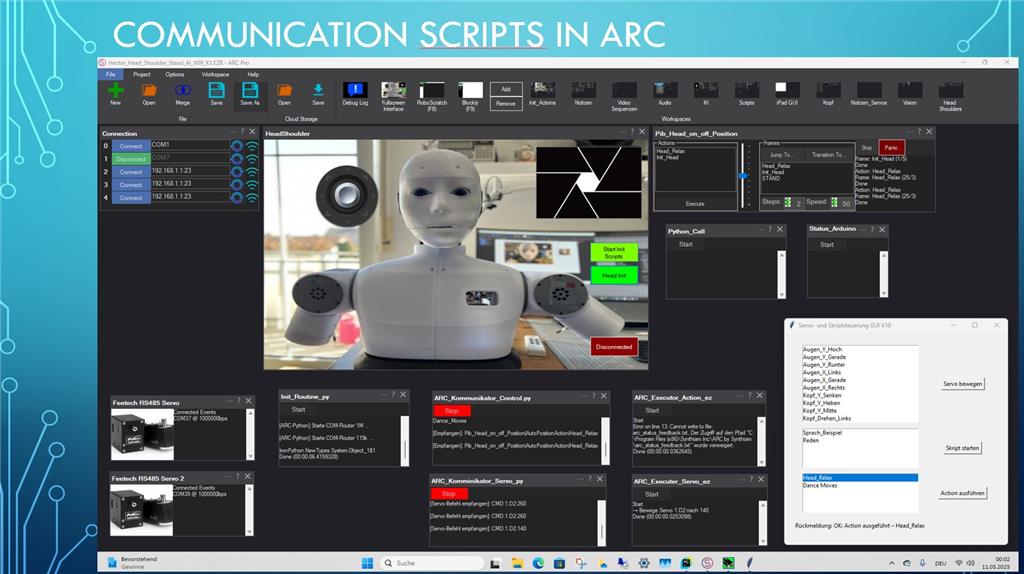
Here are a few examples of what this might look like in ARC.
And this is the appropriate executor.
Here is an example of how to organize virtual COMs. But there are also alternative approaches:
Results: Virtual COM interfaces for communication with and from ARC are well-suited to making ARC even more effective and flexible without having to develop new ARC skills.
ARC skills can certainly be more useful in some cases, such as functional skills for serial servos with full support for all servo properties. But the example shows, that there are other ways to achieve the goal. The concept isn't exclusively focused on Python. It can be combined with almost any language.It's simple, a bit old-fashioned, robust, and I find it practical.
The concept isn't exclusively focused on Python. It can be combined with almost any language.It's simple, a bit old-fashioned, robust, and I find it practical.
Perhaps it makes sense to consider a data exchange (read/write) skill. The setup could include COM, baudrate, format (JSON, CSV, etc.), and polling frequency.
It should be easy to use without any programming knowledge, just like the ARC philosophy.
If it's interesting for the community, I'd be happy to post more implementation examples.
With that in mind, have fun! cool
Here's a short video about an update to my robot, which presents its new capabilities itself.
The special fun of communicating with AI through the robot lies in the unpredictability of its responses and movements. The AI can now choose from over 50 movements and gestures based on the context. These are provided to it as a prompt (JSON file). This allows the robot to conduct free-flowing dialogues, but also to give prepared presentations in German, English, French, and Greek. Afterwards, he can seamlessly transition to a panel discussion with questions and answers about the presentation or other topics.
Here too, essential functions such as reactions while the AI is thinking or didactic pauses for reflection, as well as idle actions, were implemented again using the ARC <-> Python interface.
It really makes you want to see more.
Enjoy watching!