

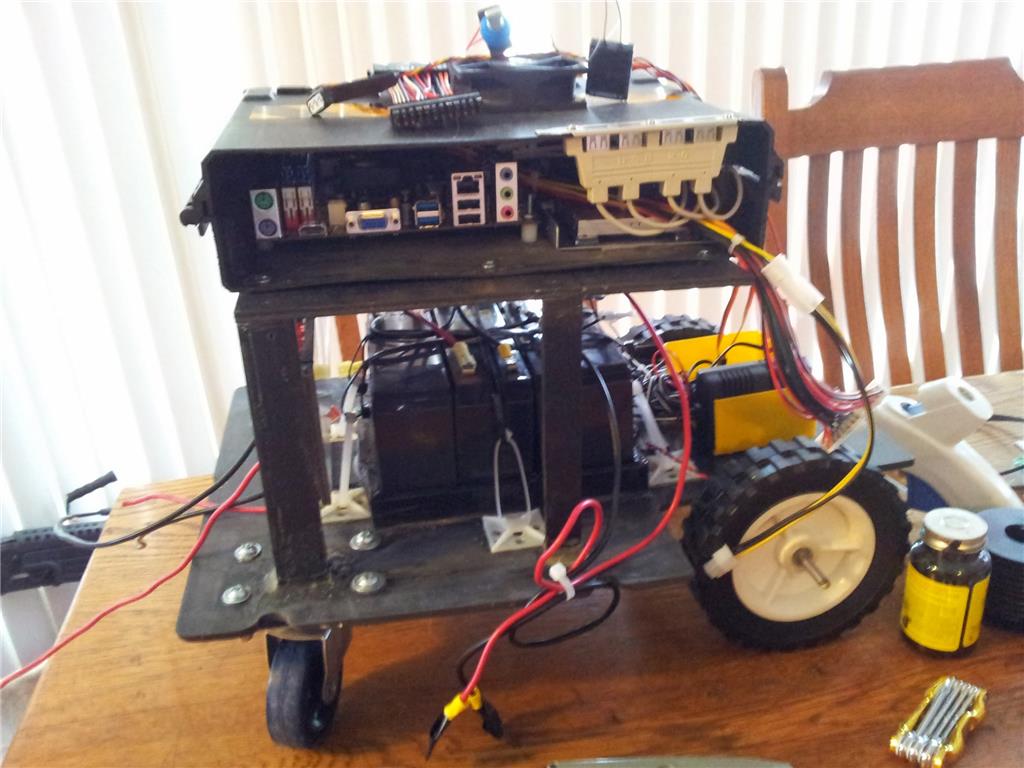
Below are photos of my prototype Sentrybot that I assembled. It is currently controlled with an Arduino Mega and a Mini ITX. I'll be pulling the Arduino as soon as my EZ-B comes in. I've incorporated two digital CCD cameras that give stereo vision, digital range finder and GPS. Currently I have it set-up to navigate by detecting my wired dog fence.

By bumsteadsean
— Last update
Other robots from Synthiam community

Jstarne1's Mr Freeze Costume Controlled By Android Phone...
App-controlled Mt Freeze suit with blue coolant hoses, LEDs, EL-wire-wrapped gun, illuminated mask and phone chest...

Thecrustychicken's Crustybot 1.2
CrustyBot 1.2: Jet3 mobility base with EZ-B 3.0 and Sabertooth 2X60, running Synthiam ARC on a netbook for...

Oakmot's Chloe Project
Home mannequin robot using EZ-B servos, camera face-tracking and Synthiam ARC control with DC power, arm plans, and...

This is my second project. It is not pretty, but it is functional. I am able to navigate this bot via WiFi. I used wiper and window motors along with a linear actuator for the arm. I am able to easily grasp and lift 80 pounds with it.
@bumsteadsean
Hardcore ! you need to watch Black Mirror (Metalhead) episode.
Taking in consideration what happened in Florida couple days ago... I would replace the guns pictures (Does not reflect my political/guns view). I feel sorry for all those innocents and related families.
i saw it here on the news ,very sad.it was an AR riffle i think.
I must be living in a cave. I did not hear about Florida. Good grief. How sad. Comment taken well. Great suggestion.
On the turret of my bot was an air-soft pellet that the kids play with.
an ez robot is much better to play with.
Hey,
At least your cave is well protected
Is that a garbage bin ? How many batteries and amps ?
It is a recycle bin. I really liked its form factor.
12 and 24 volts / 5 to 10 amps and 15 amps respectively.
The taller bot (NOMAD) is 36 volts at 15 amps.
I use and modify cheap APC and Cyber Power uninterruptible power supplies. I get them cheap here in Michigan at Microcenter.
I love the Bin used as a cover.. I am trying to figure out how to mold fiberglass to make body panels. I don't have a 3d printer so I'm going to probably use fiber glass. This is a pretty sick robot.