skullofcob
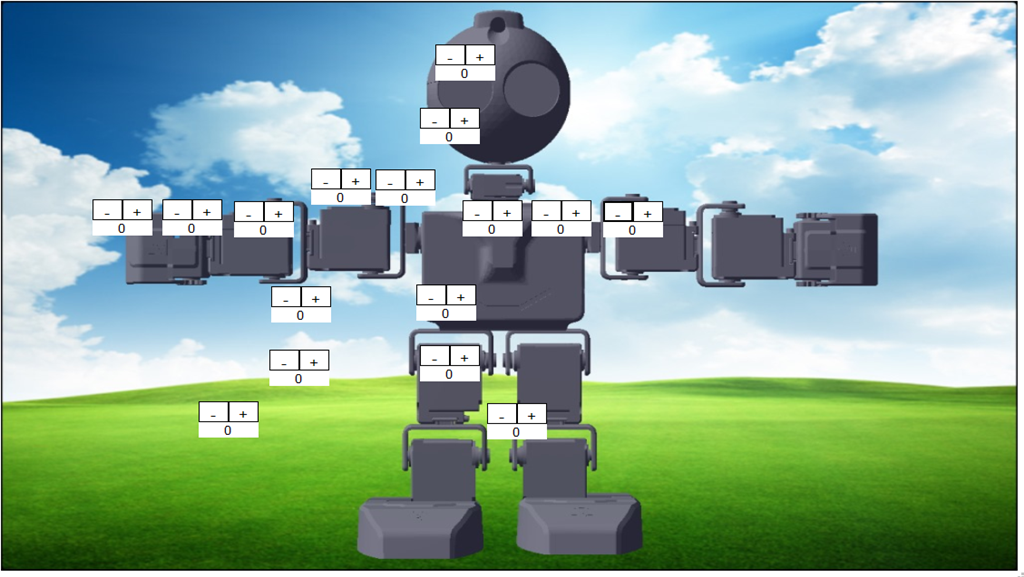
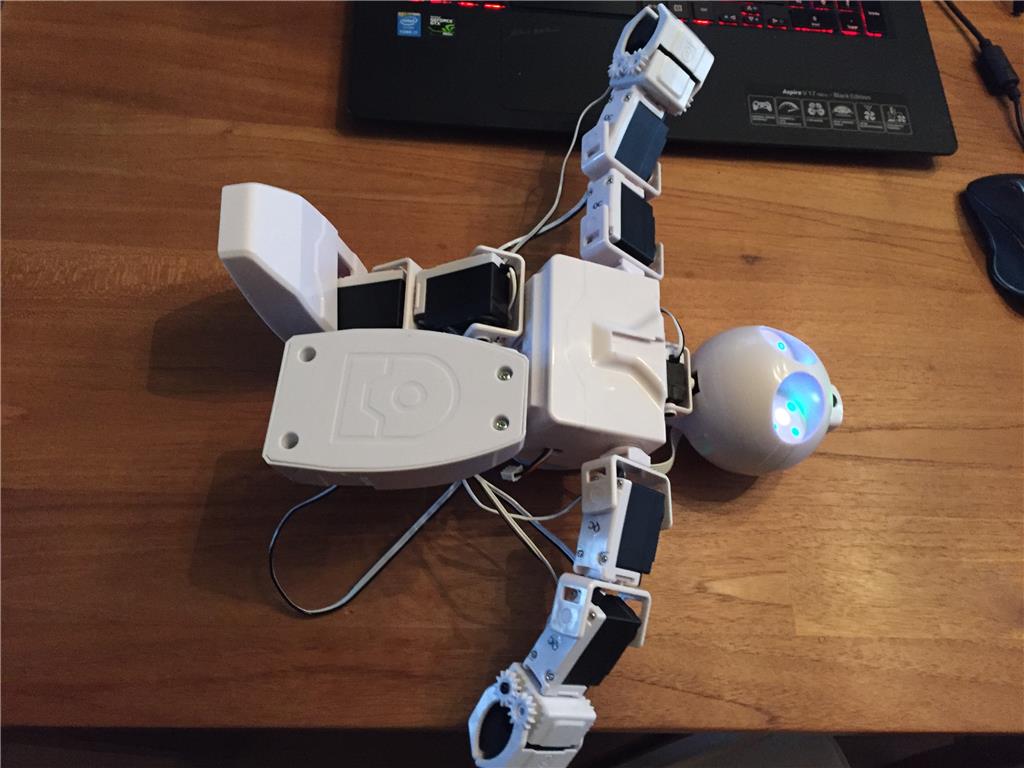
Hello, I received my jd ez-robot yesterday, this morning I rode the robot according to the proposed tutorials. It is connected in ARC as requested and that's when I have problems. All the servos are connected but when I go into project-configure, I realize that not all servos are visible in the interface. I also find that when I set a servo on the software, it is another that moves.j also have the two servos of the left foot and the left ankle that are blocked. Moreover I did not want to insist but there is a smell of burnt somewhere, so I cut the current directly. I say that this is the first start and that I have scrupulously respected all the instructions. I am going to attach to this mail, a screen printing of the console of adjustment of the servos and a photo of the reaction of the robot when I connect it via the function connect of ARC . Needless to say I am already a bit surprised at the reaction of the robot and I hope nothing is burnt or damaged. Can you help me please JD.comment test the servos one behind the other to find out if they are all operational? How to unlock the two servos that look blocked without breaking them? I have a servo tester for modelist, maybe it can help me to center all the servos avnt to redo the assembly?
Can you help me please ?
A big thanks in advance
Olivier
stress

Hello, Bad news, as I thought, there are two servos that are grilled, I tested all servos one behind the other with a servo tester. And unfortunately there are two servos that are grilled, that of the knees Left and a servo of the left arm. Here is well annoyed, how is it possible to grill these servo during the first start up? Time to go to the project tab then click on configure and hop? The question I ask myself now is that if I replace my two servos, I will not have the same problem? I have downloaded the good tutorial JD and therefore I assume that when I connect my JD on ARC, it will look for starting parameters in the project JD no? So the servos should not already be running out and therefore forced and grilling not? And what can you do for my two servos that are roasted? I also have the developer box offered by a friend, can I take the two 180 servos from this box to put them on the JD? I have to say that it could really help me to wait for new servos. Here, I will attach a picture of the two servos grilled and the photo of the servo tester I used. Note also on the level of the servos, I saw that none of the servos stays tuned to their neutral, can I put them all in neutral before reassembling the robot? And then go through configure to complete the neutrals perfectly?
Thank you so much for your help, meanwhile I will remount the robot according to the tutorial and wait for your solution.
A big thank you to you in advance Oliver
hi oliver
do you use the latest version off ARC ? and did you do the calibration.
I've never built a Revolution robot or even taken any of the tutorial for them. However I've seen this issue several times on this forum with the setup of these little robots. Each of the problems posted here seemed like the servos were installed in the robot before they were centered to what you call neutral. I think I saw a tutorial on how to do this. DJ even made a video a few weeks ago on how to do this to the servos in the feet I think. I think it would be a good idea to slowly go over each of the tutorials again for everything concerning building a JD and follow each step carefully before moving on. These tutorial steps should include calibrating each of your servos to center so this does not happen again.
Burnt smells coming from a servo usually mean that it's beyond working or soon to die. You need new servos. The servos included in the developer kit will work to replace your bad servos. However make sure you pick the exact servo to replace the bad one.
Lastly, Nomad is correct. Make sure you have the latest ARC version on your computer. Download it directly from this site or from within ARC. Good lick and have fun!
if you want i can do skype whit you.oliver
patrick.dierckx19
Hello Dave, and thank you for your reply, I just want to tell you that I followed all the tutorials in order and I scrupulously checked and understood each lesson and confirmed each one. I attached a picture of the lesson I arrived, and you will understand that I respected everything, I configured my jd on the wifi and the connection is impeccable. Then it is explained to connect the JD by the connect button, which I did, and this is where the robot went into the position I photographed and that the time to go in configure, The two servos had grilled, I did nothing but follow the instructions, then go on project and click on configure, what I did.There too I put the screen print of this That I saw, I of course cut off the power supply of the jd because I smelled the smell burned, but it was too late. So I understand your answer and I accept it, but I do not think I made a mistake. Thank you for your answer for the servos of the developer kit, so I will disassemble the two grilled servos which are both 180 degrees and take the 2 180 degrees of the kit, thank you very much for your indication. What I hope now is not having the same thing when I get to the servo tuning chapter, I must say I'm a little chilled. Anyway thanks to you for your answer. Bav Olivier
Hi Patrick, Am great to read your message, it will be with great pleasure, can you tell me when you would have a little time and we made a skype. It's when you want, when you have time, on my side I'm on leave so I would do based on you. In all case a very big thanks in advance.
Bat Olivier Ps: my skype is skull.ofcob Heuvelmans Olivier in Attert south province of luxembourg.
i have all day and avery day time.you can contact any time.oliver
did you know that calibration and fine tunning are two diff steps?