
skullofcob
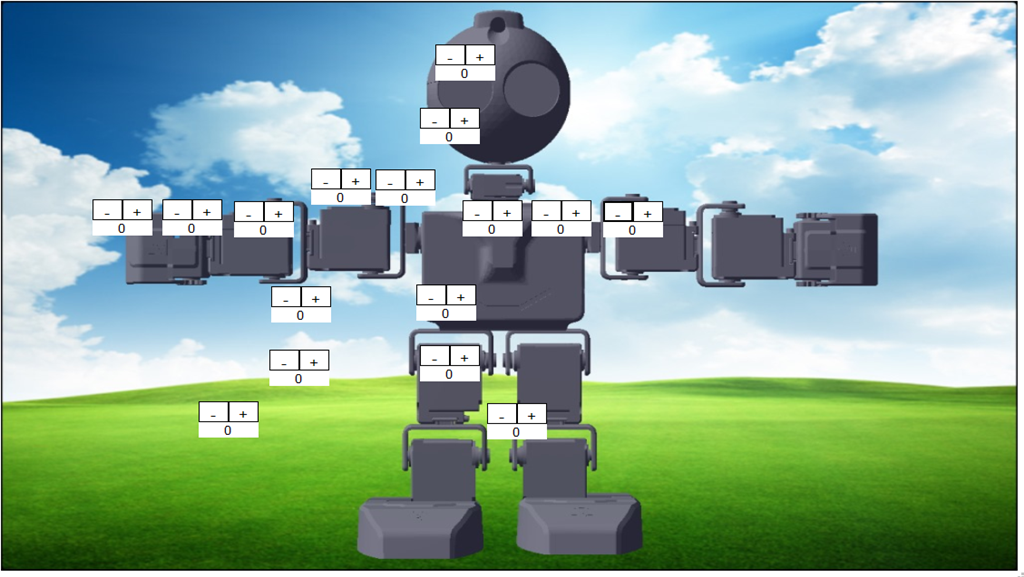
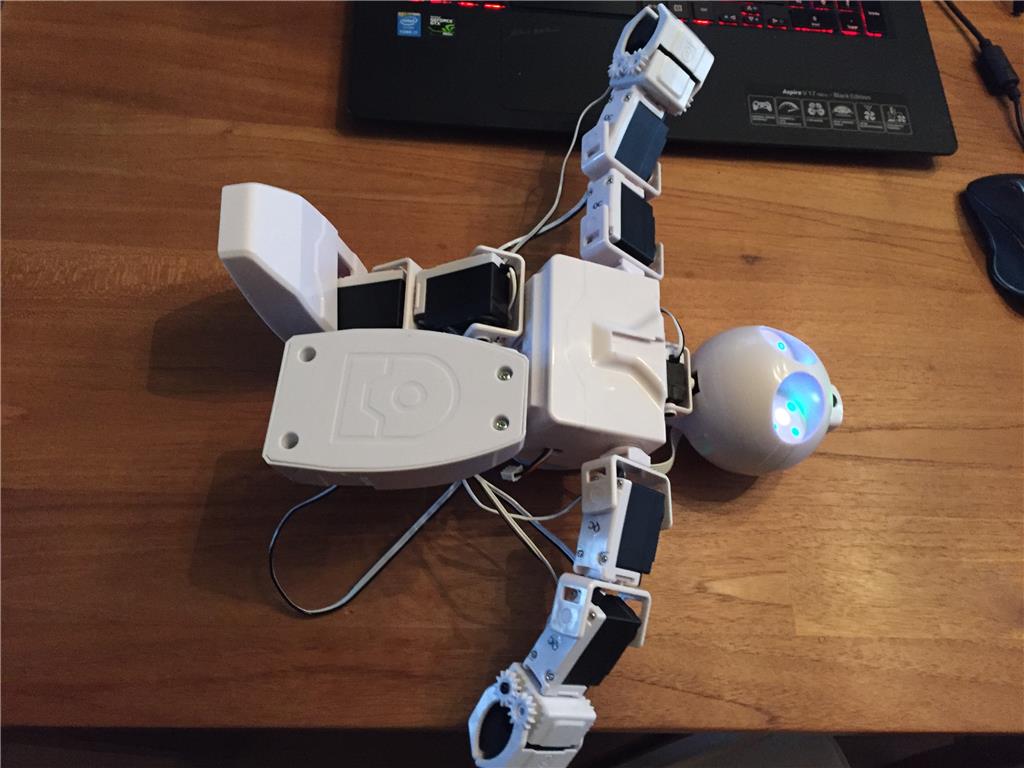
Hello, I received my jd ez-robot yesterday, this morning I rode the robot according to the proposed tutorials. It is connected in ARC as requested and that's when I have problems. All the servos are connected but when I go into project-configure, I realize that not all servos are visible in the interface. I also find that when I set a servo on the software, it is another that moves.j also have the two servos of the left foot and the left ankle that are blocked. Moreover I did not want to insist but there is a smell of burnt somewhere, so I cut the current directly. I say that this is the first start and that I have scrupulously respected all the instructions. I am going to attach to this mail, a screen printing of the console of adjustment of the servos and a photo of the reaction of the robot when I connect it via the function connect of ARC . Needless to say I am already a bit surprised at the reaction of the robot and I hope nothing is burnt or damaged. Can you help me please JD.comment test the servos one behind the other to find out if they are all operational? How to unlock the two servos that look blocked without breaking them? I have a servo tester for modelist, maybe it can help me to center all the servos avnt to redo the assembly?
Can you help me please ?
A big thanks in advance
Olivier
stress

Patrick,
I propose to you to make a skype tomorow morning at 10 am if it's ok for you.
You speak french ? ) sorry for my bad english but sometime it's more easy in my mother tong
) sorry for my bad english but sometime it's more easy in my mother tong ) French
) French ).
).
About calibration yes i know and about fine tuning i'm not arrived at this point .
.
We'll speak about this tomorow if it's ok for you patrick, i'm happy to find a people whose can help me in my country great )).
)).
Good evening Patrick and thank you very much for your help
Best regards Oliver see you tomorow i hope, if you want another time you'll decide and i'll be ok with this
see you tomorow i hope, if you want another time you'll decide and i'll be ok with this )
)
sorry i dont speak french.but we will do fine in englich. tomorrow is fine.i alllreddy looked you up in skype.
Patrick,
It's not a problem, i understand now what you say when you speak about calibration, i have made this but tomorow morning i'll recalibrate all servo to be sure and we can skype at 11:00 am because i want to do this before.
Thank you Patrick and skype you tomorow with my bad english but my happy face )))
)))
good evening
and thanks
oliver

yes we do this from start.leave the bad ankle dissasembled. we gonna calibrate whithout any bracket or foot assembled. so the servo can move freely to 90 degree (center)
seeya tomorow whit happy face.
good avening too
what you need to do is follow the calibration lessons from the JD Tutorial: https://synthiam.com/Tutorials/Course/1
hi dj
oliver says he done the complete tutorial step by step. so there must be something he missed or do not have latest version, from ARC.we dont know what device he using. so i thought it is a good idea to see in skype what oliver does, step by step.i just cheked the link again for myself. its really clear and a good video from the ankle.
thank you
Oliver has not completed the following tutorial steps in his user profile for the calibration lessons from the JD Tutorial: https://synthiam.com/Tutorials/Course/1
maybe he didn checked the box and just read it. am not doing this to undermind your tutorials, but to be sure the robot working good,and to see, whats going wrong.bud your wright averybody, chould read and checked the box.