
Hello All,
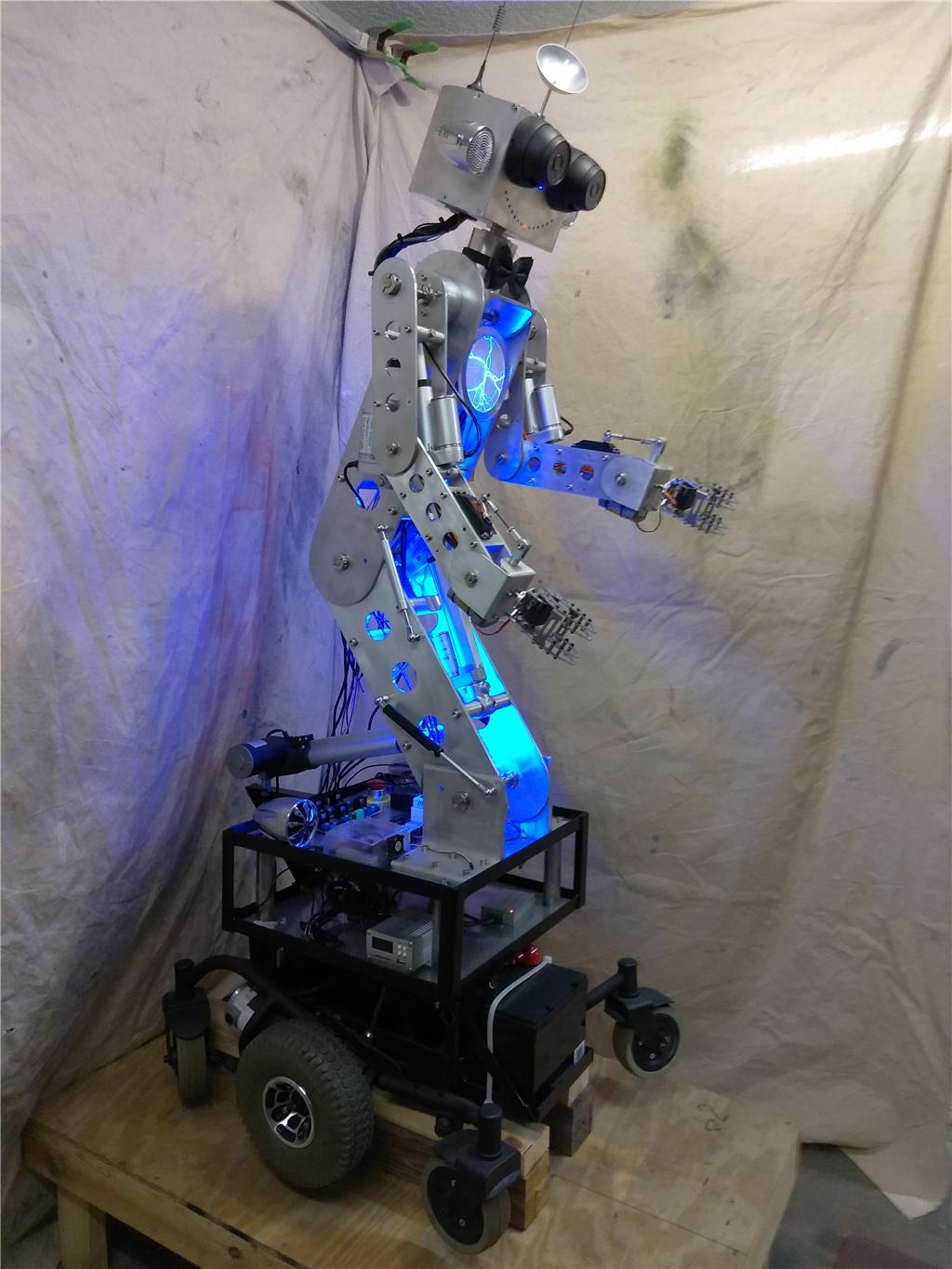
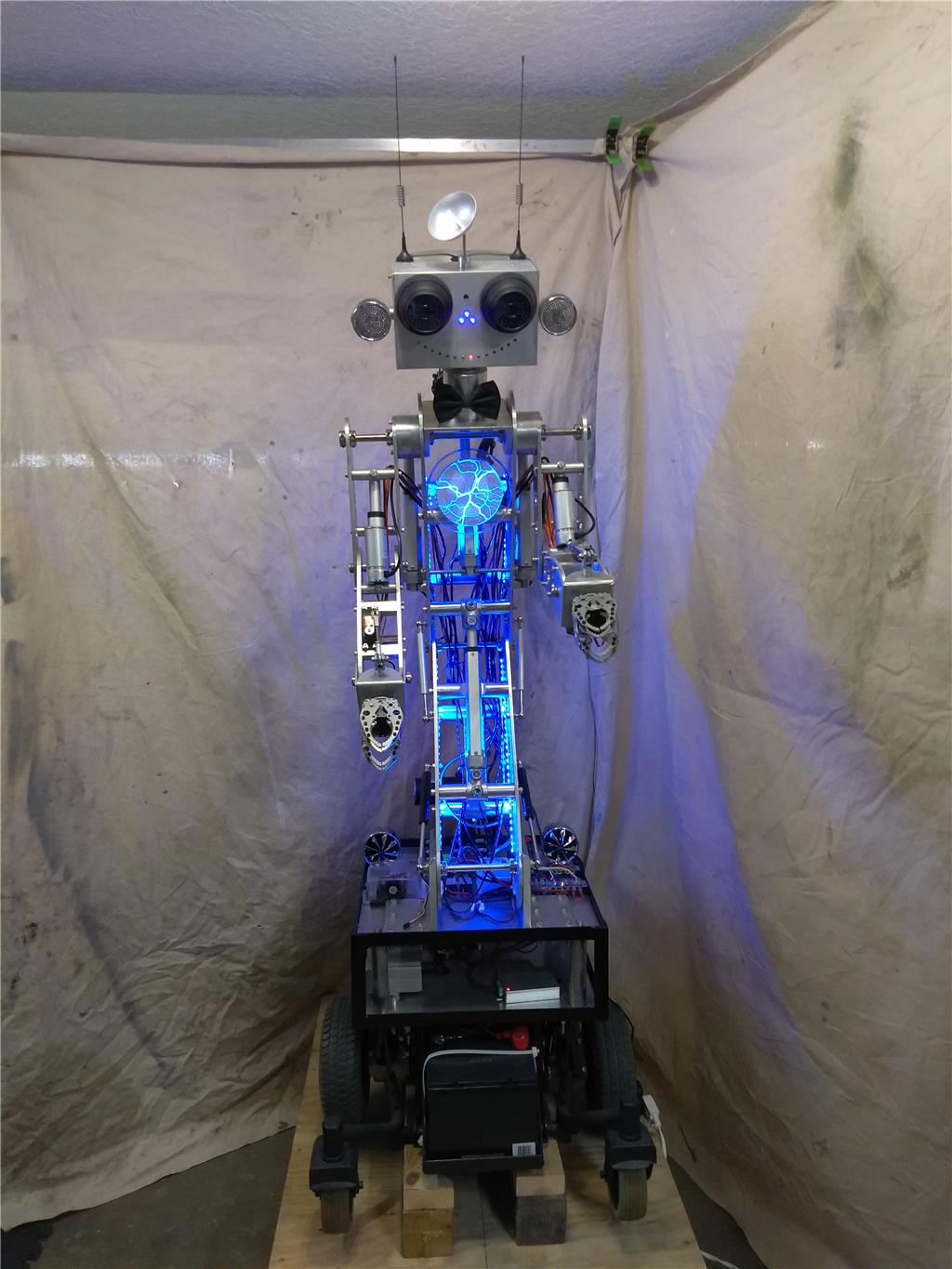
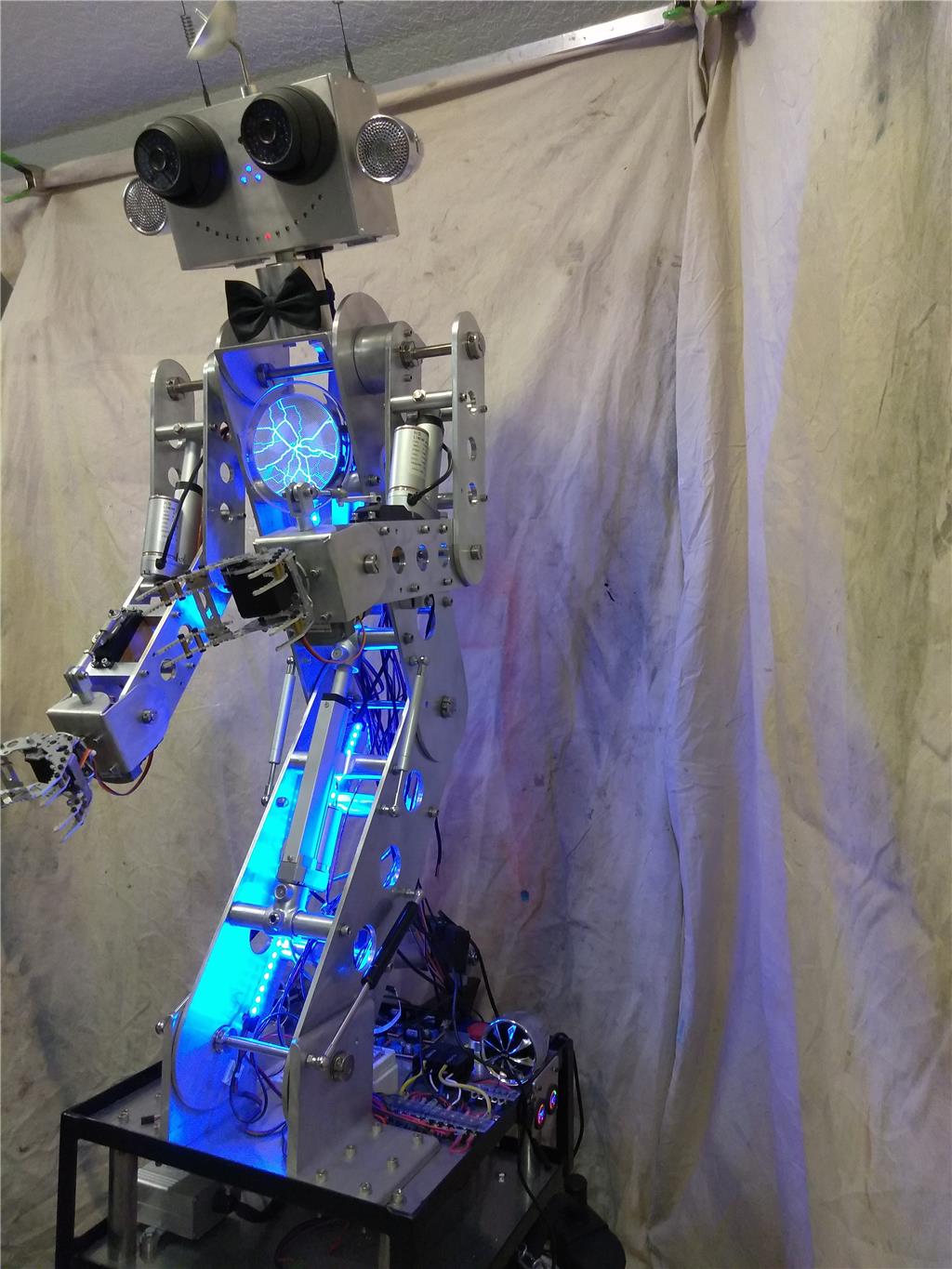
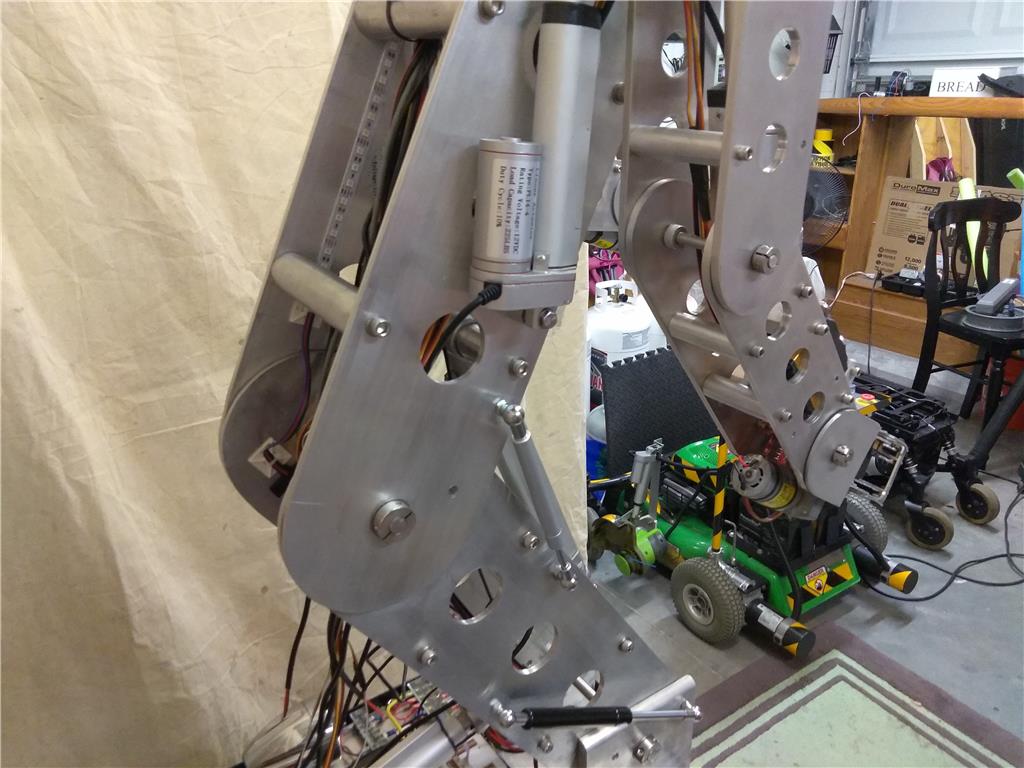
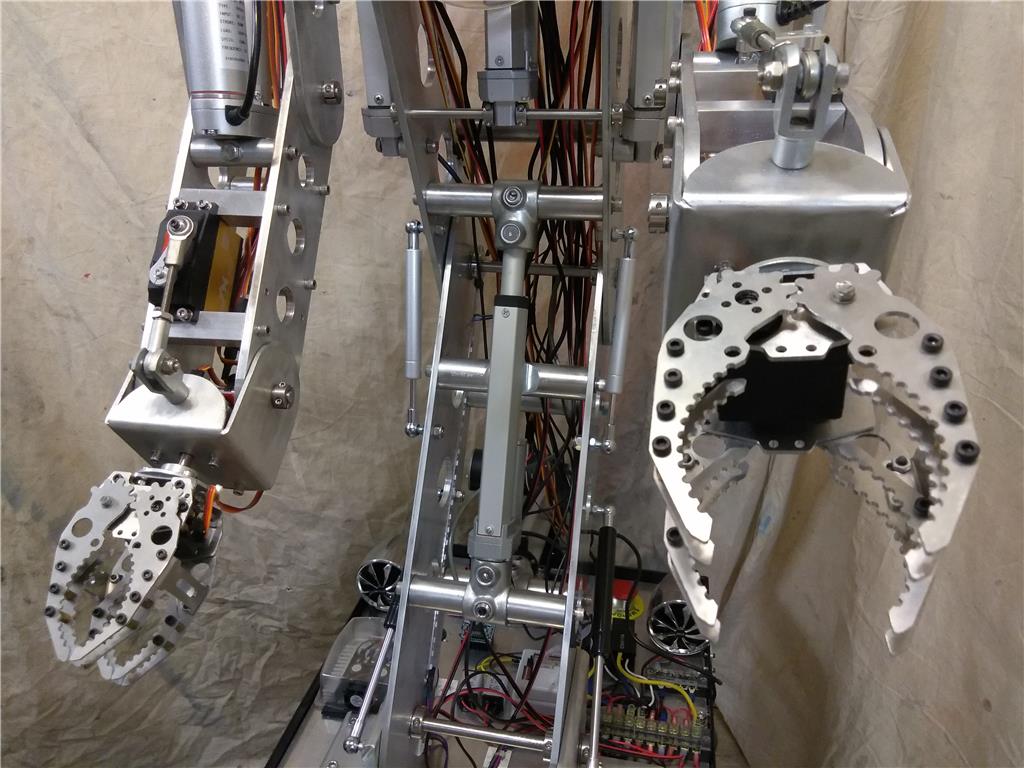
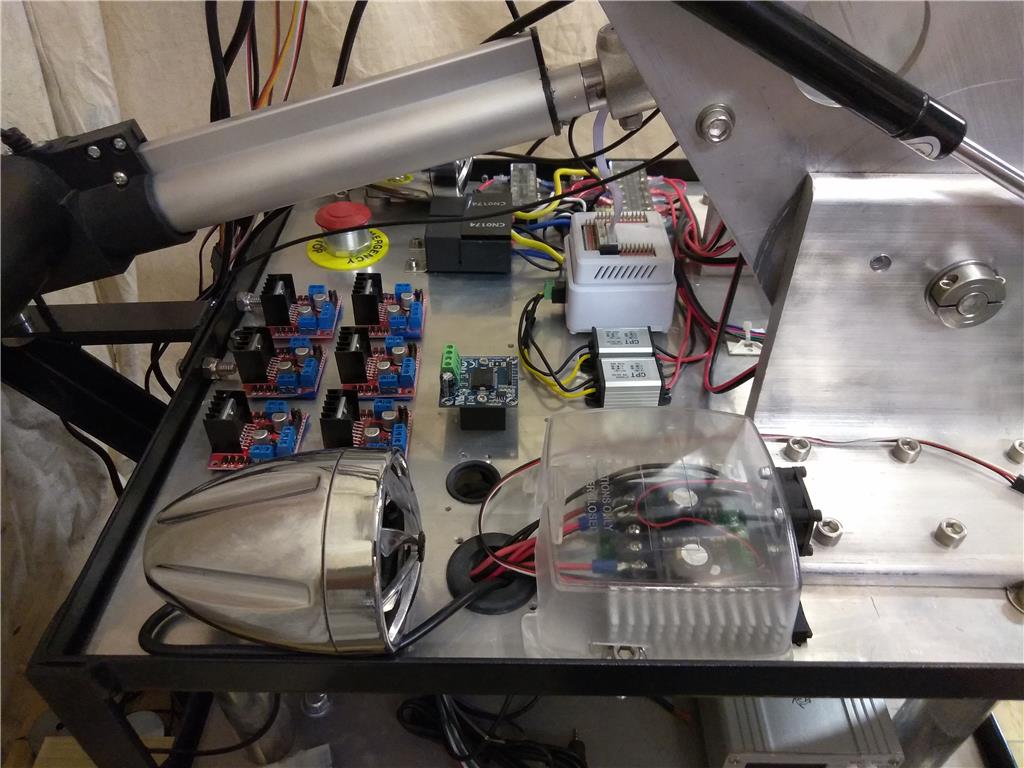
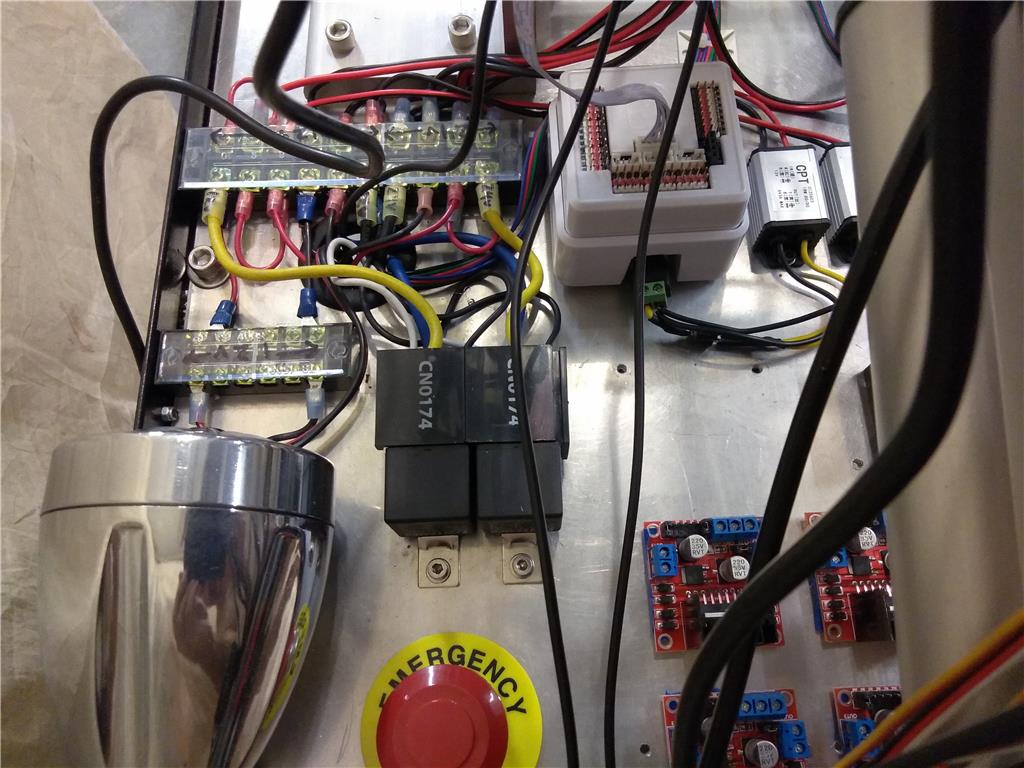
this is Rob-bot. He is my first shot at building a life size robot and 90% of him was custom made by me. I started him approx. 3 years ago in my spare time (working family man) and slowly built him piece by piece. I admit I did steal some of his look from Johnny 5, but it was because I love Johnny 5's look and wanted mine to resemble him a little bit. He is 100% battery operated, utilizing 4 12v 35ah batteries and uses 12v and 24v components. His normal standing position he is 6 feet tall and can stand straight up to about 6.5 feet tall. All of his actuators/servos are rated at 150lbs or more with the exception of his hands and his body is made from high quality thick aluminum alloys and stainless steel. Also, all moving parts have ball bearings. Both of his eyes are HD night vision cameras and the tiny hole between his eyes is where the EZ-Robot cam is located. His nose and mouth are high intensity leds and his mouth moves in sync with the words he will speak. His ears are 300 watt motorcyle speakers that are connected to and amplifier and in sync with his mouth for words or music. I accented him with a miniature spinning satellite dish on top of his head, a plasma light effect on his chest and high intensity color changing leds throughout his spine for a glowing effect. Now that he is finally built, I am ready to start learning how to program him via his EZ-B V4. My programming skills are no where as good as my mechanical skills, so I'm hoping between my knowledge of electronics and the tutorial videos and all of you, my fellow robot enthusiasts, I will be able to finally complete Rob-bot. And thank you to the many of you that have already answered some of my many questions and your patience. I hope you all enjoy the pics...



Discover more robots

Rz90208's First Look At Fud2

Tony1952's My Rolly Boxbot


Thanx CEM, I appreciate the kind words.
Fantastic build. It's nice to see another large scale robot. It reminds me a lot of my ARMadeus Mk. 7 project that I posted here a few years ago. Linear actuators are also some of my favorite mechanical components. My current Mk. 12 version, now under construction, will have torso, arm and head movements similar to yours. I guess great minds think alike. The Mk. 12 is using 3 linear actuators, 2 servo City gearboxes, and 4 EZ-Robot HDD servos. Keep up the good work. Programming a robot using the EZ-B v4/2 is surprisingly easy.
Jim Milan
Waw, I'm impressed ! Congratulations !
Thanks for the comps guys.
"It reminds me a lot of my ARMadeus Mk. 7 project that I posted here a few years ago."
Jim, could you send me a link or pics to your ARMadeus bot. I would love to see it.
Yeah Jim, I think for full size bots, linear actuators and industrial size servos are perfect for the money. I also, came up with a more simplified and cheap way to make linear actuators with feedback instead of paying over $130 for one built in. The link is on this forum in recent activity.
Rob-bot
Here's the link to the Mk. 7 version I built 5 years ago.
ARMadeus Mk. 7
And here's the link to ARMadeus Mk. 11, completed last summer. Rather than build a completely new robot each time, I'm now going with a universal base concept. The Mk. 12 now under construction will be a new personality module that mounts on the Mk. 11 base. The torso, arms, head assemblies for the Mk. 12 are nearly completed. Only, wiring, electronics, lights, sensor array, and programming are left to do.
ARMadeus Mk. 11
Jim, that is an awesome robot! I remember seeing it on the cover of servo magazine. I believe I still have that issue. Great machining and wiring skills. Very professional looking. It reminds me of the early 80's style robots, but with a lot more modern functionality. I believe they were referred to as Intellibots or something like that. I love the vintage scifi robot look, thats why I went with a look similar to Johnny 5. I can't wait to see your next bot.
Rob-bot,
Thanks. It was a fun build. It's taken nearly two decades of tinkering to get to this stage. I'm pleased with the decision to go with a universal base concept. Having all the shared resources, power distribution, computer control, servo power, motor controllers, and pneumatics in a modular base greatly simplifies the process of changing the functionality of the robot. I put a lot of thought into optimizing the mechanical and electrical interfaces between the modular subsystems. This allows me to easily disassemble and reassemble the robot for transport.
The Mk. 12 should be completed this summer. It uses the same grippers as your bot. I'll be posting details when it's done.
I can't wait to see the finished bot and some video.
I'm hoping too to be done with Rob-bot by the end if this summer. I would like to try building a humanoid, but not sure if I want the 3D printed being they are kind of flimsy. I would like to use all lightweight alloys to give it some strength and a metallic look.