
I would like to see a pair of segmented robotic arms attached at the base without a torso. The two arms could act as legs and walk upright or as a pair of arms and climb up structures or aver obstacles hand over hand. This would be great for search and rescue or reconnaissance.
Discover more robots
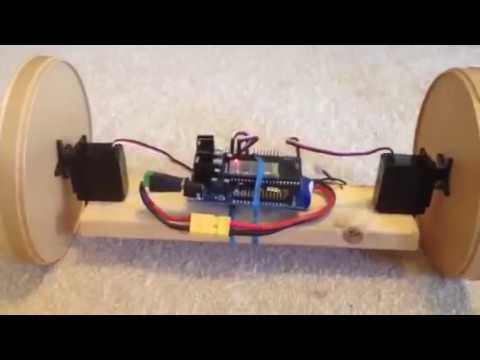
Steve's Rolling Bot Ez Robot Experiment
Build a rolling bot with EZ Robot EZB3 using coffee-lid wheels, continuous-rotation servos and LiPo-simple balance...
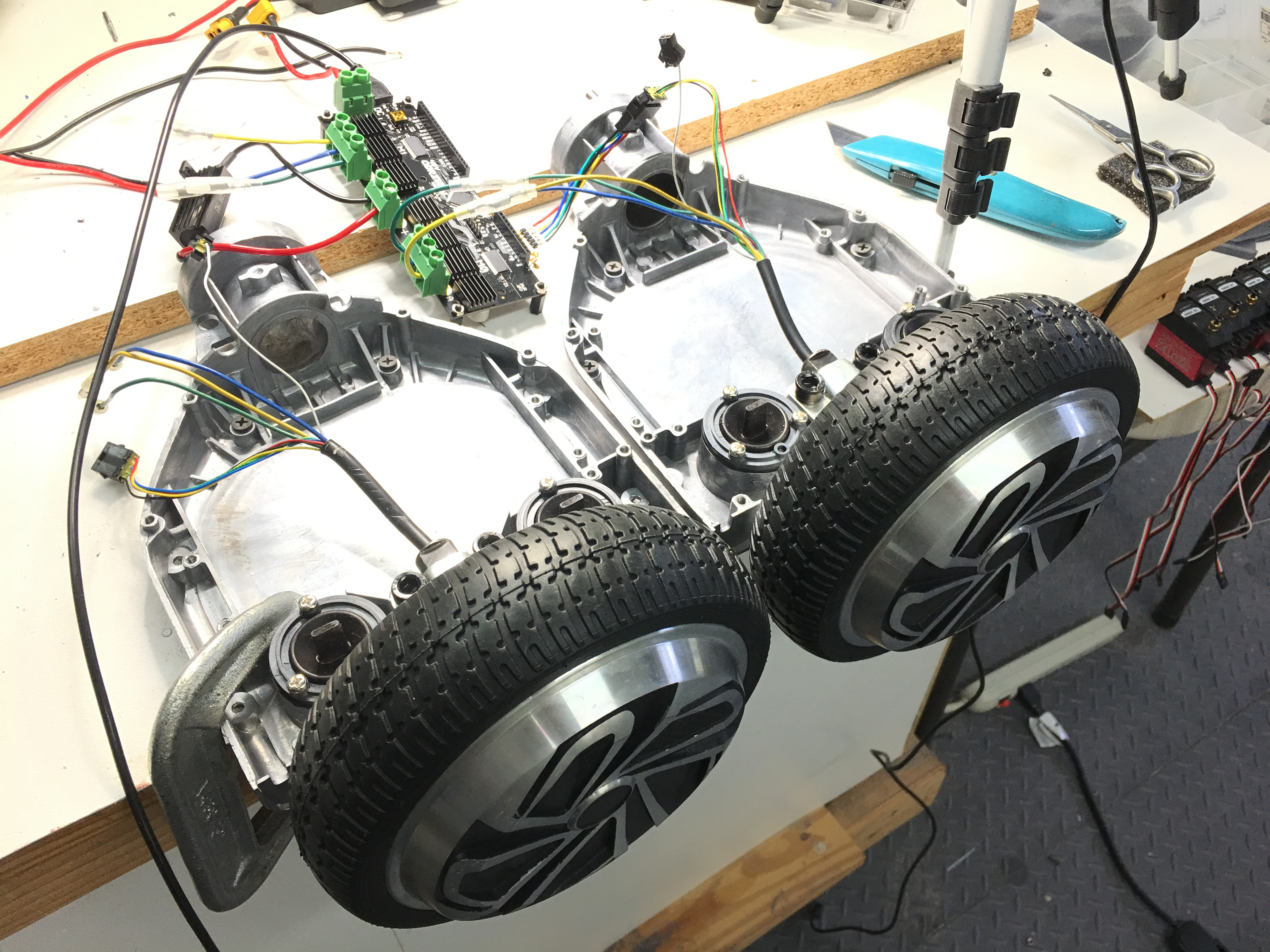
Fxrtst's Untitled Hoverboard Project
Build a robot base with cheap hoverboard 3-phase motors and Flipsky FSESC VESC - programmable ESCs, servo connector,...

Steve's Artamus, The Rambo Knight Robot Hack
Artamus Rambo Knight Autobot hacked with EZ Robot control: RC soft-hack, VR, voice synthesis, servos, 9-DOF arms, LiPo...
