I found your web site and im interested but i have no desire to controll the robot. I would like to start with a mobile rotation wheel base, an ajustable head with three lowcost but effective cameras, two microphones and a small speaker. I would also like to impliment wifi and spend the rest of my budget on as muc processing power and memory for an adaptable ai program. Try to make papero on a budget.
By mrpaw.co
Discover more robots
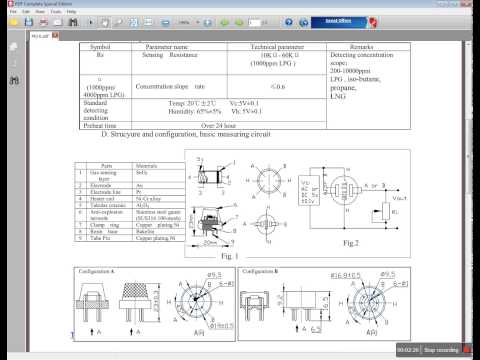
Luis's Using A Mq-? Sensor With The Ezb4 And ARC
Demo video posted-watch the demo and enjoy; creator happy to answer any questions.
Mac's Irobot - Scuplture
Sculpture inspired by Asimov's I, Robot explores robots protecting humanity; face-tablet shows human faces and clips of...

Cliffordkoperski's Hydrualic Arm And Hand
Hydraulic system operated with EZB4 controller
