


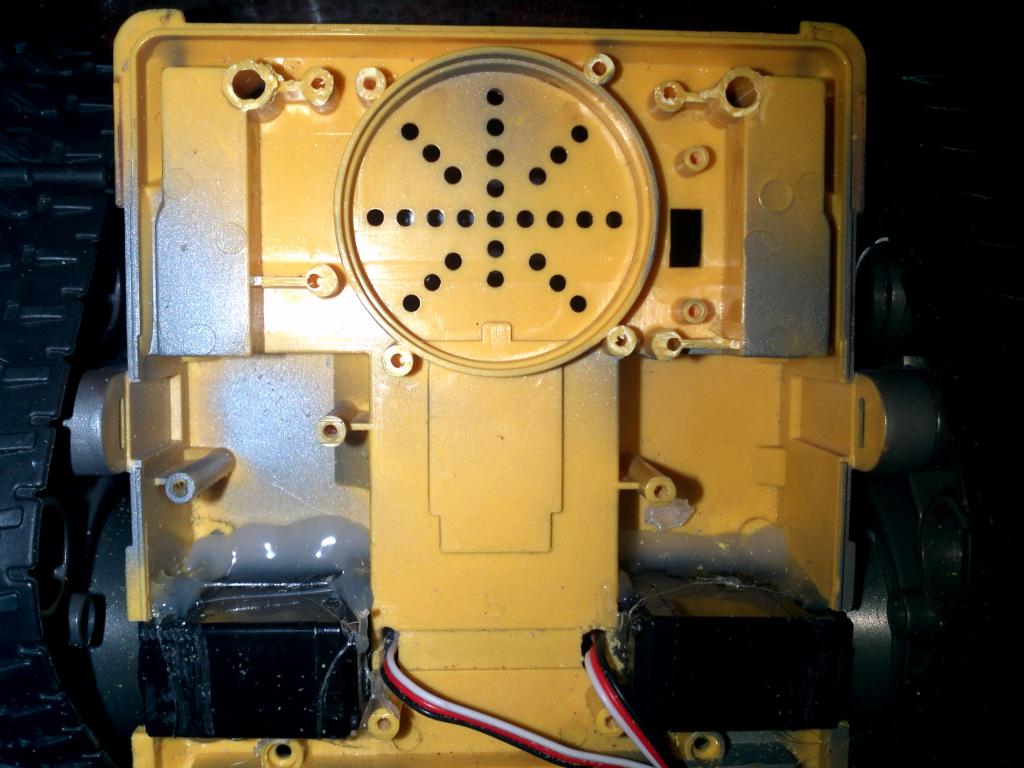
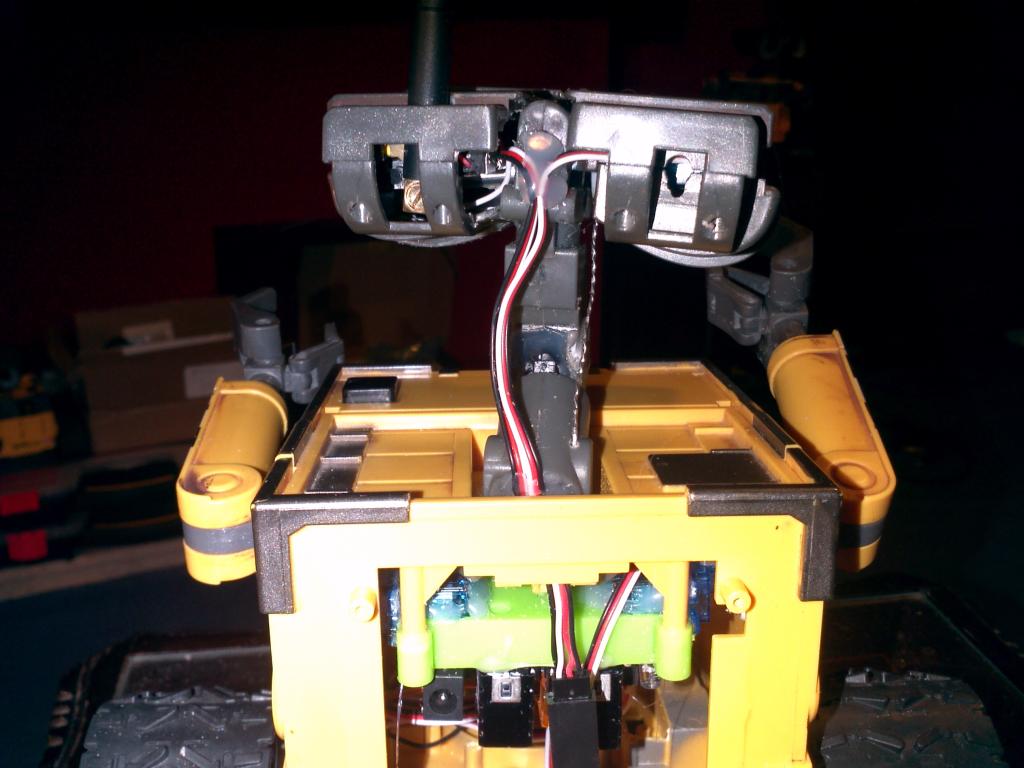
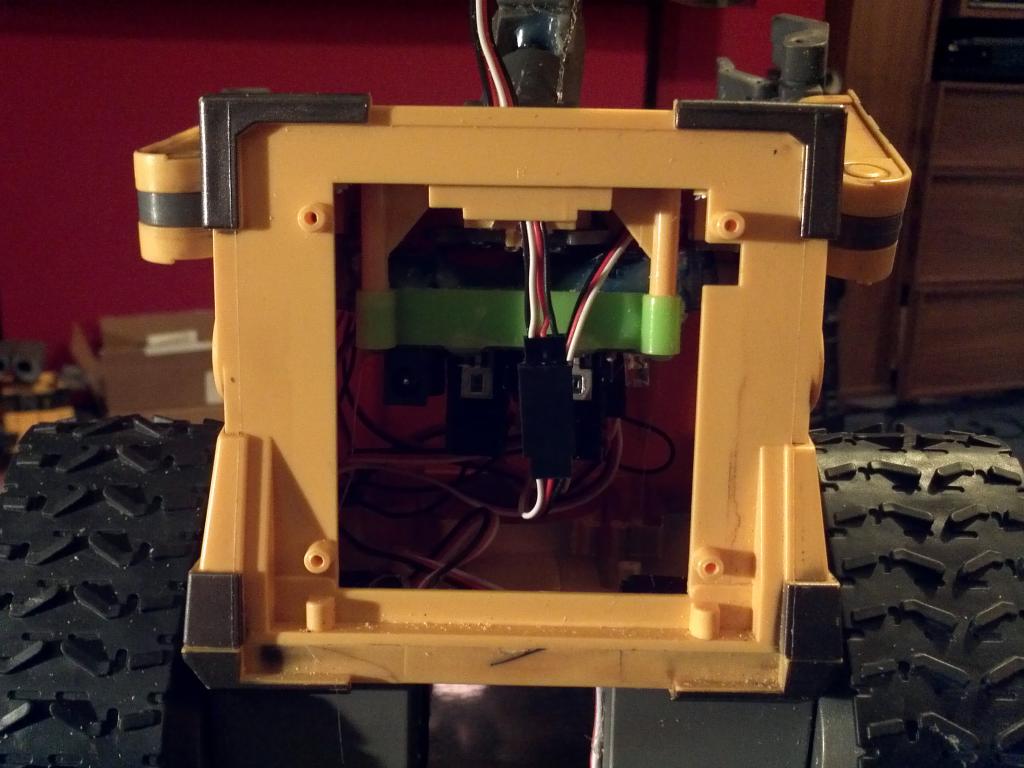

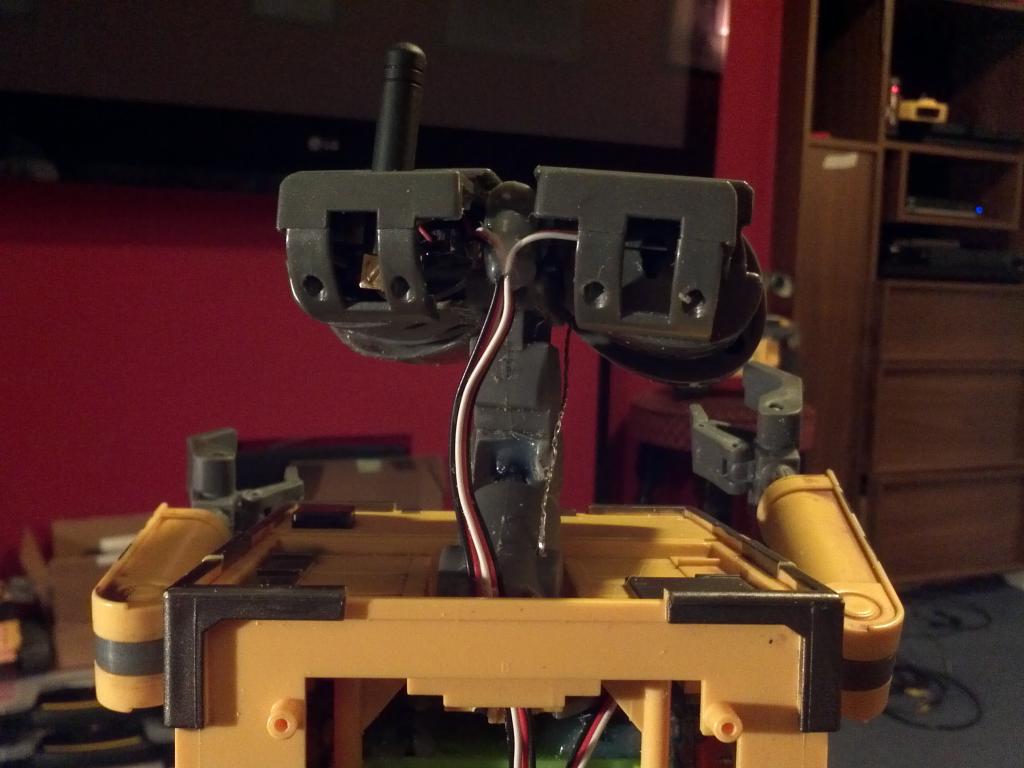

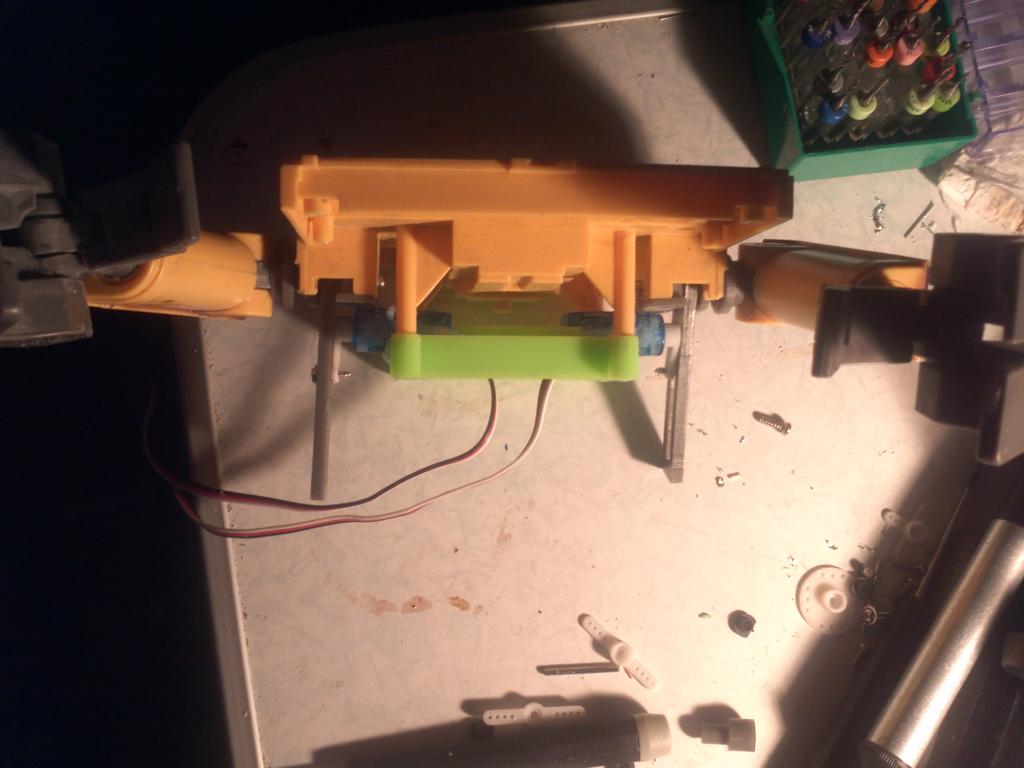
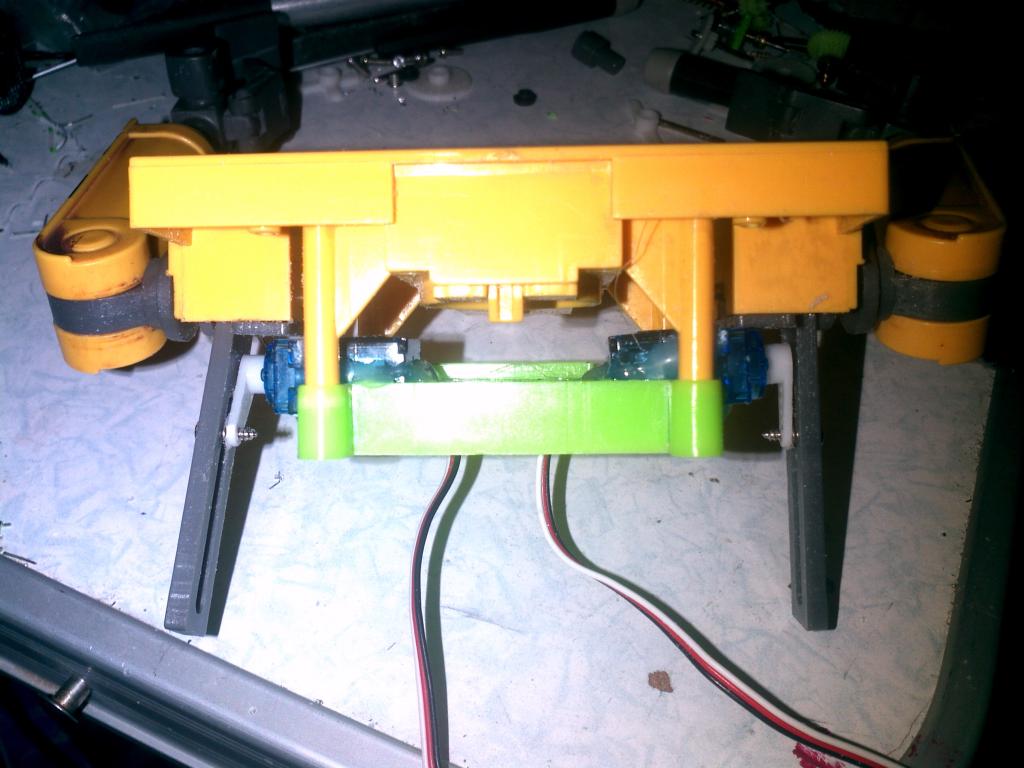
Hi, This is my take on the EZ-B Wall.e While I wait for my kit to arrive I thought I would share some ideas. The first step was to do the arms, I had some small servos left over from an Arduino project which will do the arms and hopefully the neck too. So far I have the arm section done, I will post as I go along and I welcome any suggestions.
This method leaves the clutch in place on the arms. It also gives around 80 of movement in his arms.
Regards
Djandco
By Djandco
— Last update
Discover more robots

Ezang's ARC - A Short Video - My Tank Base Robot - DC...
Synthiam ARC controls a tank chassis with EZB IO Tiny and L298 H-Bridge PWM, with wiring and settings for forward,...

Therat's My Own Wall-E
Learn the ez-robot platform to build RC ground and flying drones and a DIY WallE using a Roli kit and a newly won...

Bret's Roborad
RoboRAD combines a RAD 2.0 base and a Robosapien into a hybrid robot for hobbyist builders

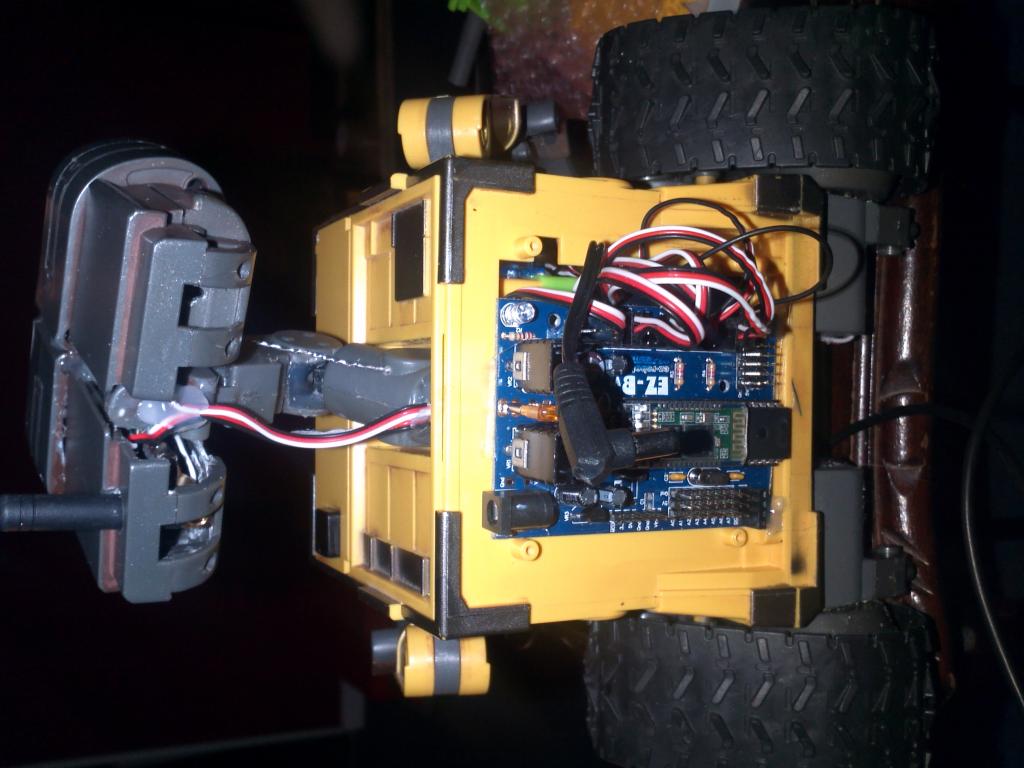
I added a 6v 4.5ah battery today which meant that the EZ-B has to go on the back. Obviously this was planned to increase the air flow over the regulators to keep them cool
The only problem I have now is when I load the project the board does not connect. I just get a fast flashing red, slow flashing blue and the builder locks out. Tried restarting and all sorts of things but my project simply works no more mad If I connect and do simple things then it works fine, just doesn't like big projects by the look of it!
Djandco, I am running two EZ-B's with over 22 servos, 3 H-Bridges , 3 transistor switches, and 4 analog ports and mine run just fine. I don't think your problem is your largeness. When I am having trouble I always check the last thing I did. Maybe something happened during your new battery install.
I used the Large Wall.e 2 example and changed the settings to suit my servo's. Then I saved it under a different name. The thing was running fine then just dropped out. I was trying to get the speech rec to work (with no joy) so I opened the example again and made the changes again and it works fine. As you say, you look at the last thing you do but in this case it was adjusting the mic settings.
As this is the first one there are bound to be mistakes
But all is working again, (apart from the speech bit!)
I assume with the amount of servo's you are using you are not building a Wall.e then? Either that or it is going to be one monster of one!
I am building a buster. My Buster is getting bigger every day. Way out of control.
Your gonna need to upgrade to a omnibot 2000 to fit all your electronics pretty soon bookmaker lol